



Системы дорожного контроля СДК.Ам

| Номер в ГРСИ РФ: | 15389-13 |
|---|---|
| Производитель / заявитель: | ООО НИПВФ "Тензор", г.Ростов-на-Дону |
| 15389-13: Описание типа СИ | Скачать | 190.4 КБ |
Для измерений вертикальных сил воздействия на дорожное покрытие как движущегося так и неподвижного автотранспортного средства, определения его массы, скорости движения и межосевых расстояний, для применения на предприятиях и в организациях, эксплуатирующих автомобильные дороги, мосты, склады, элеваторы, порты и т.п., где необходимо получение оперативных сведений о нагрузках на дорожное покрытие, грузовых потоках и структуре этих потоков.
Информация по Госреестру
| Основные данные | |
|---|---|
| Номер по Госреестру | 15389-13 |
| Наименование | Системы дорожного контроля |
| Модель | СДК.Ам |
| Класс СИ | 28.02 |
| Год регистрации | 2013 |
| Страна-производитель | Россия |
| Примечание | 11.07.2013 утвержден вместо 15389-01 |
| Информация о сертификате | |
| Срок действия сертификата | 11.07.2018 |
| Тип сертификата (C - серия/E - партия) | C |
| Дата протокола | Приказ 797 п. 55 от 11.07.201309д от 01.08.06 п.37410 от 26.06.01 п.275 |
Производитель / Заявитель
ООО НИПВФ "Тензор", г.Ростов-на-Дону
Россия
344090, пр.Стачки, 200/1, тел./факс (863) 297-52-43, 297-52-44; 344058, ул.2-я Краснодарская, д.129. Тел/факс: 8 (863) 218-55-80, 218-55-90, 218-55-83, http://tenzor.math.rsu.ru, E-mail: tenzor@ms.math.rsu.ru
Поверка
| Методика поверки / информация о поверке | МИ 3410-20113 |
| Межповерочный интервал / Периодичность поверки | 1 год |
| Зарегистрировано поверок | 234 |
| Найдено поверителей | 27 |
| Успешных поверок (СИ пригодно) | 218 (93%) |
| Неуспешных поверок (СИ непригодно) | 16 (7%) |
| Актуальность информации | 22.12.2024 |
Поверители
Скачать
| 15389-13: Описание типа СИ | Скачать | 190.4 КБ |
Описание типа
Назначение
Системы дорожного контроля измерительные СДК.Ам (далее - системы) предназначены для:
- измерения осевых нагрузок и массы в движении или с остановкой порожних и груженых автодорожных колёсных транспортных средств, в том числе автопоездов, автоцистерн с жидкими грузами, включая сжиженные газы;
- статического взвешивания грузов, полностью размещаемых на грузоприемной платформе.
Описание
Принцип действия систем основан на преобразовании деформаций упругих элементов датчиков, возникающих под действием нагрузки на грузоприемную платформу в цифровой электрический сигнал, пропорциональный измеряемой массе. Далее измерительная информация поступает в персональный компьютер (далее - ПК). На основании этой информации программное обеспечение (далее - ПО) систем вычисляет для каждой оси значения осевых нагрузок, а также значение массы взвешиваемых транспортных средств (далее -ТС). Результаты измерений и вспомогательная информация выводятся на экран монитора и сохраняются в памяти ПК.
Системы состоят из грузоприемного устройства (далее - ГПУ), блока питания ГПУ и ПК, соединенных с ГПУ кабельной электрической линией связи.
ГПУ размещается на специально подготовленной площадке или на отдельной полосе движения участка дороги с твердым покрытием (далее - зона весового контроля). ГПУ состоит из рамы, грузоприемной платформы, четырех цифровых весоизмерительных тензо-резисторных датчиков ДВТ-10-Р (далее - датчики) с узлами встройки. Датчики имеют неразъемное соединение через соединительную коробку с блоком питания ГПУ и ПК. Блок питания ГПУ и ПК размещаются в отапливаемом помещении. Грузоприемная платформа подвешена внутри рамы на датчиках растяжения и может быть накрыта защитным металло-полимерным настилом, края которого закреплены на неподвижной раме.
Системы выпускаются в модификациях с обозначением «СДК.Ам- X-Y-Z», где:
« X» - определяет конструктивные особенности и принимает значения:
«1» - для ГПУ без защитного настила,
«2» - для ГПУ с металло-полимерным защитным настилом;
«Y» - определяет требования к зоне весового контроля и принимает значения:
«1» - ГПУ установлены на специальных площадках и предназначены для статического измерения осевых нагрузок и массы неподвижных ТС, а также для автоматического измерения массы ТС в движении с ограничением скорости до 6 км/ч;
«2» - ГПУ встроены непосредственно в дорогу и предназначены для автоматического измерения осевых нагрузок и массы ТС в движении с ограничением скорости до 90 км/ч.
«Z» - определяет наличие тех или иных сервисных устройств (по отдельному заказу), и может принимать значения и их сочетания:
«В» - наличие устройства видеонаблюдения и автоматической записи изображения ТС в момент взвешивания,
«И» - наличие устройства идентификации взвешиваемых ТС,
«У» - наличие устройства автоматического управления движением ТС.
Общий вид встроенного непосредственно в дорогу ГПУ системы с металло-полимерным защитным настилом показан на Рисунке 1.

Рисунок 1 - Общий вид встроенного непосредственно в дорогу ГПУ системы с металло-полимерным защитным настилом
Программное обеспечение
ПО систем функционально делится на метрологически значимую и незначимую части. Метрологически значимая часть осуществляет обработку измерительной информации, сохранение результатов юстировки и измерений в базе данных. В состав метрологически значимой части ПО входят подпрограммы защиты результатов юстировки и измерительной информации, включая защиту при передаче информации в базу данных. Метрологически значимая часть ПО формирует управляющие сигналы для метрологически незначимой части ПО, которая осуществляет взаимодействие с сервисными устройствами.
Системы обеспечивают выполнение функций:
- автоматической установки нуля и слежения за нулем;
- определения направления движения ТС через ГПУ;
- автоматического формирования базы данных результатов измерений движущихся в потоке ТС с фиксацией даты и времени проезда.
По дополнительному заказу системы могут быть оснащены устройствами:
- видеонаблюдения и автоматической записи изображения ТС в момент взвешивания;
- идентификации взвешиваемых ТС;
- автоматического управления движением ТС с помощью светофоров и громкой связи.
При запуске ПО выполняется проверка целостности и подлинности метрологически значимой части. При нарушении целостности ПО, на монитор ПК выводится сообщение о характере нарушений и работа систем блокируется. Юстировка систем возможна только при наличии пароля и специального электронного ключа. Все изменения юстировочных коэффициентов сохраняются в электронном журнале событий.
Идентификационные данные метрологически значимой части ПО отображаются на мониторе ПК во время работы программы в главном окне на вкладке «Идентификационные признаки ПО Системы» и соответствуют таблице 1.
Таблица 1
|
Наименование ПО |
Идентификационное наименование ПО |
Номер версии |
Цифровой идентификатор ПО (контрольная сумма файла) |
Алгоритм вычисления цифрового идентификатора ПО |
|
МЗПО Etalon МЗПО СДК.Ам ПО Klient |
Etalon.dat Hash_MZPO.dat Klient car.exe |
не применяется не применяется V.1.0.3.XX1) |
DC0950C1 6FB02B50 CEBB97FC2) |
CRC32 CRC32 CRC32 |
|
Примечание: 1) XX - обозначение номера версии метрологически незначимой части ПО; 2) контрольная сумма файла Klient_car.exe может меняться при изменении версии метрологически незначимой части ПО. | ||||
Защита от несанкционированного доступа к системам осуществляется программными средствами, а также опломбированием соединительной коробки, к которой подключены датчики.
Защита ПО от непреднамеренных и преднамеренных изменений соответствует уровню «С» согласно МИ 3286-2010.
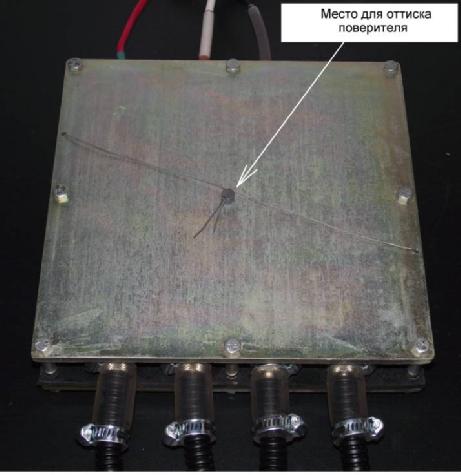
Знак поверки в виде оттиска поверительного клейма наносится на пломбу на соединительной коробке. Знак поверки в виде наклейки и записи, заверенной подписью поверителя с нанесением оттиска поверительного клейма, размещается в разделе сведений о проведении поверок руководства по эксплуатации.
Схема пломбировки приведена на Рисунке 2.
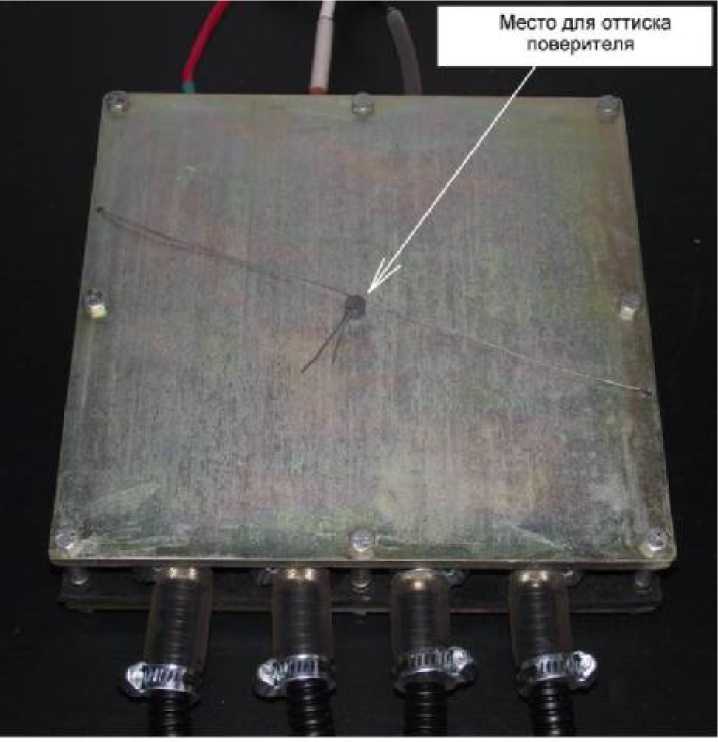
Рисунок 2 - Схема пломбировки систем
Технические характеристики
1 Режим статического взвешивания различных грузов, полностью размещаемых на грузоприёмной платформе
Наибольшая нагрузка, т
Наименьшая нагрузка, т
Цена деления, т
Пределы допускаемой абсолютной погрешности при поверке, т в интервалах нагрузок, т:
- от 1,5 до 10
- свыше 10 до 20
В эксплуатации пределы допускаемой абсолютной погрешности удваиваются.
2 Режим измерений осевых нагрузок неподвижных ТС Наибольшая осевая нагрузка, т
Наименьшая осевая нагрузка, т
Наибольшее число осей ТС (n), шт
Цена деления, т
Пределы допускаемой относительной погрешности измерений осевых нагрузок неподвижных ТС представлены в таблице 2
Таблица 2
|
В интервалах осевых нагрузок (N), т |
Пределы допускаемой относительной погрешности измерений осевых нагрузок неподвижных ТС, % от измеренного значения для модификаций | |
|
СДК.Ам-Х-1 |
СДК.Ам-Х-2 | |
|
6 < N < 20 |
±1 |
±2 |
|
3 < N < 6 |
±2 |
±3 |
|
1,5 < N < 3 |
±4 |
±4 |
где: N- измеренное значение осевой нагрузки ТС
3 Режим измерений массы неподвижных ТС Наибольшее число осей ТС (n), шт
Наибольшая масса ТС, т
Наименьшая масса ТС, т
Цена деления, т
Пределы допускаемой относительной погрешности измерений массы неподвижных ТС в зависимости от расчетного значения относительной погрешности массы ТС представлены в таблице 3.
Таблица 3
|
В зависимости от расчетного значения относительной погрешности массы ТС (5м), % от измеренного значения |
Пределы допускаемой относительной погрешности измерений массы неподвижных ТС, % от измеренного значения |
|
5м < 1 |
±1 |
|
1 < 5м < 2 |
±2 |
|
2 < 5м < 3 |
±3 |
где: 5м - расчетное значение относительной погрешности массы ТС, автоматически вычисляемое ПО, в зависимости от значений измеренных осевых нагрузок ТС.
4 Режим измерений осевых нагрузок ТС в движении Наибольшая осевая нагрузка, т
Наименьшая осевая нагрузка, т
Наибольшее число осей ТС (n), шт
Цена деления, т
4.1 Взвешивание ТС в движении со скоростью в интервале от 1 до 6 км/ч
4.1.1 В интервале осевых нагрузок (N), т.............................................1,5 < N < 3 пределы допускаемой относительной погрешности измерений осевых нагрузок в зависимости от коэффициента неравномерности движения представлены в таблице 5.
Таблица 5
|
В зависимости от коэффициента неравномерности движения (кнер), в условных единицах |
Пределы допускаемой относительной погрешности измерений осевых нагрузок ТС, % от измеренного значения |
|
Кнер < 4 |
±4 |
|
4 < Кнер < 8 |
±8 |
|
8 < Кнер < 16 |
±16 |
|
16 < Кнер |
не нормируются |
где: кнер - здесь и далее расчетное значение коэффициента неравномерности движения, автоматически вычисляемое ПО, в зависимости от неравномерности движения и собственных колебаний ТС.
4.1.2 В интервале осевых нагрузок (N), т.............................................. 3 < N < 6
пределы допускаемой относительной погрешности измерений осевых нагрузок в зависимости от коэффициента неравномерности движения представлены в таблице 6.
Таблица 6
|
В зависимости от коэффициента неравномерности движения (кнер), в условных единицах |
Пределы допускаемой относительной погрешности измерений осевых нагрузок ТС, % от измеренного значения для модификаций | |
|
СДК.Ам-Х-1 |
СДК.Ам-Х-2 | |
|
кнер < 2 |
±2 |
±3 |
|
2 <кнер < 4 |
±4 |
±4 |
|
4 < кнер < 8 |
±8 |
±8 |
|
8 < кнер < 16 |
±16 |
±16 |
|
16 < кнер |
не нормируется | |
4.1.3 В интервале осевых нагрузок (N), т..............................................6 < N < 20
пределы допускаемой относительной погрешности измерений осевых нагрузок в зависимости от коэффициента неравномерности движения представлены в таблице 7.
Таблица 7
|
В зависимости от коэффициента неравномерности движения (кивр), в условных единицах |
Пределы допускаемой относительной погрешности измерений осевых нагрузок ТС, % от измеренного значения для модификаций | |
|
СДК.Ам-Х-1 |
СДК.Ам-Х-2 | |
|
кнер < 1 |
±1 |
±2 |
|
1 <кнер < 2 |
±2 |
±3 |
|
2 <кнер < 4 |
±4 |
±4 |
|
4 < кнер < 8 |
±8 |
±8 |
|
8 < кнер < 16 |
±16 |
±16 |
|
16 < кнер |
не нормируется | |
4.2 Взвешивание ТС в движении со скоростью в интервале свыше 6 до 20 км/ч
Пределы допускаемой относительной погрешности измерений осевых нагрузок в интервале скоростей свыше 6 до 20 км/ч, в зависимости от коэффициента неравномерности движения представлены в таблице 8.
Таблица 8
|
В зависимости от коэффициента неравномерности движения (кнер), в условных единицах |
Пределы допускаемой относительной погрешности измерений осевых нагрузок ТС в интервале скоростей свыше 6 до 20 км/ч, % от измеренного значения ТС |
|
Кнер < 8 |
±8 |
|
8 < Кнер < 16 |
±16 |
|
16 < Кнер |
не нормируется |
4.3 Взвешивание ТС в движении со скоростью в интервале свыше 20 до 90 км/ч
Пределы допускаемой относительной погрешности измерений осевых нагрузок ТС в движении в интервале скоростей свыше 20 до 90 км/ч при коэффициенте неравномерности движения кнер < 16....................................................±16 % от измеренного значения.
При коэффициенте неравномерности движения кнер > 16 пределы допускаемой относительной погрешности измерений осевых нагрузок ТС не нормируются.
5 Режим измерений массы ТС в движении Наибольшее число осей ТС (n), шт
Наибольшая масса ТС, т
Наименьшая масса ТС, т
Цена деления, т
Пределы допускаемой относительной погрешности измерения массы ТС в движении в зависимости от расчетного значения относительной погрешности массы ТС представлены в таблице 9
Таблица 9
|
В зависимости от расчетного значения относительной погрешности массы ТС (5м), % от измеренного значения |
Пределы допускаемой относительной погрешности измерений массы ТС в движении, % от измеренного значения |
|
5м < 1 |
±1 |
|
1 < 5м < 2 |
±2 |
|
2 < 5м < 3 |
±3 |
|
3 < 5м < 7 |
±7 |
|
7 < 5м < 10 |
±10 |
|
10 < 5м < 15 |
±15 |
где: 5м - расчетное значение относительной погрешности массы ТС, автоматически вычисляемое ПО, в зависимости от значений измеренных осевых нагрузок ТС с учётом их погрешностей.
6 Режим измерений расстояний между смежными осями ТС в движении со скоростью в интервале свыше 6 до 90 км/ч
Наибольшее расстояние, м
Наименьшее расстояние, м
Цена деления, м
Пределы допускаемой относительной погрешности измерений расстояний между смежными осями одиночного ТС, % от действительного значения ±4 %.
Для автопоездов и сочлененных ТС пределы допускаемой относительной погрешности измерений расстояний между последней осью тягача и первой осью прицепа (полуприцепа) возрастают на величину относительного люфта в сцепных устройствах.
Погрешность измерений расстояний между смежными осями ТС в движении со скоростью в интервале от 1 до 6 км/ч не нормируется.
7 Общие характеристики для всех модификаций и всех режимов работы систем
Наибольшая скорость ТС при взвешивании, км/ч ............. 90
Наименьшая скорость ТС при взвешивании, км/ч ............1
Погрешность измерений скорости ТС не нормируется
Диапазон рабочих температур, 0С:
- для ГПУ и линии связи...................................................... от минус 40 до плюс 50
- для ПК и периферийного оборудования .......................... от плюс 15 до плюс 30
Время готовности, мин ........................................................ 30
Электрическое питание от сети переменного тока:
- напряжение, В .................................................................... от 187 до 242
- частота, Гц.......................................................................... от 49 до 51
Размеры грузоприемной платформы, мм, не более............4000х1000
Длина кабельной линии, м................................................... до 1000
Знак утверждения типа
Знак утверждения типа наносится графическим способом на маркировочную табличку, расположенную в приборном отсеке грузоприёмного устройства и штемпелем на титульный лист руководства по эксплуатации.
Комплектность
|
Система |
1 шт. |
|
Устройство видеонаблюдения и автоматической записи изображения ТС, шт. (по дополнительному заказу) |
1 шт. |
|
Устройство автоматической идентификации ТС, шт. (по дополнительному заказу) |
1 шт. |
|
Устройство автоматического управления движением ТС, шт. (по дополнительному заказу) |
1 шт. |
|
Руководство по эксплуатации |
1 экз. |
|
Методика поверки |
1 экз. |
Поверка
осуществляется по документу МИ 3410-2013 «Рекомендация ГСИ «Системы дорожного контроля измерительные СДК.Ам. Методика поверки», утвержденному ГЦИ СИ ФГУП «ВНИ-ИМС» 20 июня 2013 г.
Основные средства поверки:
- гири, соответствующие классу точности М1-2 по ГОСТ OIML R 111-1-2009.
Сведения о методах измерений
Изложены в СДК.Ам-01.000.000 РЭ «Система дорожного контроля измерительная СДК.Ам.
Руководство по эксплуатации» в разделе «Использование по назначению»
Нормативные документы
ГОСТ 8.021-05 «ГСИ. Государственная поверочная схема для средств измерения массы»,
ТУ 4274-005-49804336-2013 «Система дорожного контроля измерительная СДК.Ам. Технические условия».
Рекомендации к применению
при осуществлении мероприятий государственного контроля (надзора) в части измерений массы автотранспортного средства (приказ Министерства внутренних дел Российской Федерации от 8 ноября 2012 г. № 1014);
при осуществлении торговли и товарообменных операций.
Смотрите также
