



Система ультразвукового контроля СОНОТРОН™-ЕМАТ 880

| Номер в ГРСИ РФ: | 49567-12 |
|---|---|
| Производитель / заявитель: | Фирма "NDT Technologies Inc.", Канада |
{kind=link}
Система ультразвукового контроля СОНОТРОН╔-ЕМАТ 880 (далее по тексту ╞ система) предназначена для измерения координат дефектов в области головки и шейки рельса ультразвуковым импульсным зеркально-теневым методом.
Информация по Госреестру
| Основные данные | |||||||
|---|---|---|---|---|---|---|---|
| Номер по Госреестру | 49567-12 | ||||||
| Наименование | Система ультразвукового контроля | ||||||
| Модель | СОНОТРОН™-ЕМАТ 880 | ||||||
| Характер производства | Единичное | ||||||
| Идентификатор записи ФИФ ОЕИ | fa57bfd9-68b6-6bd5-3124-3bc3ebd39e5b | ||||||
| Испытания |
|
||||||
| Год регистрации | 2012 | ||||||
| Общие данные | |
|---|---|
| Класс СИ | 27.01 |
| Год регистрации | 2012 |
| Страна-производитель | Канада |
| Информация о сертификате | |
| Срок действия сертификата | .. |
| Номер сертификата | 46098 |
| Тип сертификата (C - серия/E - партия) | E |
| Дата протокола | Приказ 231 п. 28 от 13.04.2012 |
Производитель / Заявитель
Фирма "NDT Technologies Inc.", КАНАДА
Канада
Поверка
| Методика поверки / информация о поверке | МП 30.Д4-12 |
| Межповерочный интервал / Периодичность поверки |
1 год
|
| Зарегистрировано поверок | |
| Найдено поверителей | |
| Успешных поверок (СИ пригодно) | 10 (100%) |
| Неуспешных поверок (СИ непригодно) | 0 (0 %) |
| Актуальность информации | 04.01.2026 |
Поверители
Скачать
|
49567-12: Описание типа
2012-49567-12.pdf
|
Скачать | 139.9 КБ | |
| Свидетельство об утверждении типа СИ | Открыть | ... |
Описание типа
Назначение
Система ультразвукового контроля СОНОТРОН™-ЕМАТ 880 (далее по тексту - система) предназначена для измерения координат дефектов в области головки и шейки рельса ультразвуковым импульсным зеркально-теневым методом.
Описание
Принцип действия системы основан на зеркально-теневом методе ультразвукового контроля. В качестве метода возбуждения и приема ультразвуковых колебаний применяется бесконтактный электромагнитно-акустический (ЭМА) метод, что уменьшает влияние окалины и других загрязнений поверхности рельса на результаты контроля. Данный метод основан на эффекте преобразования высокочастотных электромагнитных колебаний в акустические колебания (и наоборот) поверхностью металла в постоянном магнитном поле.
При пропускании через обмотку электромагнитно-акустических преобразователей (ЭМАП) импульсов тока ультразвуковой частоты на поверхности рельса возникает вихревой ток. Взаимодействие вихревого тока с внешним магнитным полем электромагнита приводит к возникновению ультразвуковых колебаний поверхности рельса, которая тем самым превращается в излучатель ультразвука. Прошедшие через изделие и отраженные от противоположной поверхности ультразвуковые колебания снова вызывают колебания поверхности рельса под ЭМАП. Поскольку эта поверхность тоже находится в магнитном поле электромагнита, её колебания приводят к возникновению тока на поверхности рельса, который трансформируется в обмотку приемного ЭМАП. Таким образом, при использовании ЭМАП излучателем и приемником ультразвука становится сама поверхность рельса, расположенная в зоне действии обмоток преобразователей.
На рисунке 1 представлена фотография общего вида системы.
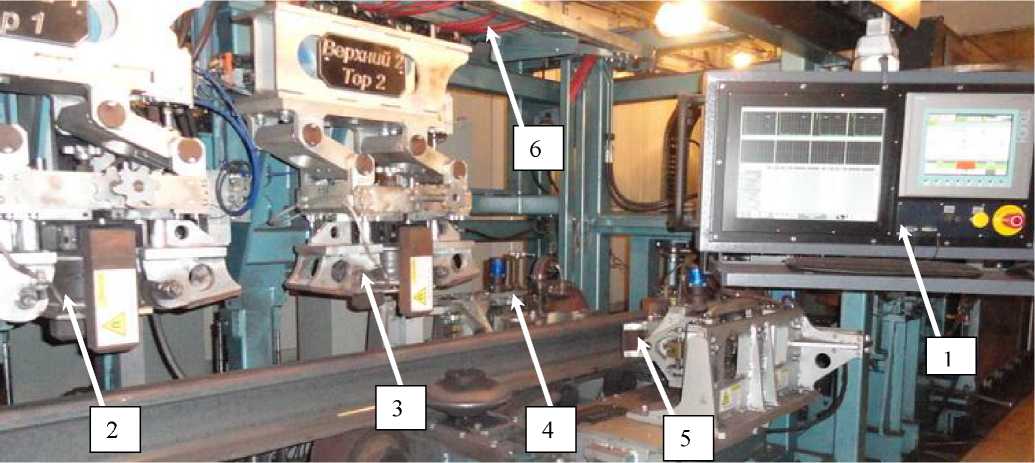
Рисунок 1 - Общий вид системы
На рисунке 1 цифрами обозначены: 1 - пульт управления; 2 - ЭМАП «Тор 1»; 3 - ЭМАП «Тор 2»; 4 - ЭМАП «Side 1»; 5 - ЭМАП «Side 2»; 6 - компьютер микросистемы СО-НОТРОН™-ЕМАТ 880.
По каждому синхроимпульсу компьютера микросистемы СОНОТРОН™-ЕМАТ 880 (Sonotron 880 MS) во всех четырех каналах одновременно с заданной вручную частотой заполнения и длительностью формируются радиоимпульсы, которые усиливаются в усилителе мощности зондирующих импульсов (УМЗИ). С выхода УМЗИ радиоимпульс поступает на соответствующий ЭМАП, расположенный под полюсом электромагнита (ЭМ). ЭМ создает магнитное поле, ориентированное по нормали к поверхности контролируемого изделия. Витки рабочей части ЭМАП параллельны поверхности изделия, поэтому к результате взаимодействия постоянного магнитного поля с полем вихревых токов в изделии возникают т.н. поперечные ультразвуковые колебания. Эти колебания распространяются в направлении противоположной поверхности рельса. Принятый ЭМАП сигнал подается на соответствующий вход микросистемы СОНОТРОН™-ЕМАТ 880, усиливается с заданным коэффициентом усиления, оцифровывается и отображается на экране компьютера микросистемы СОНОТРОН™-ЕМАТ 880 в виде Аскана. Анализ амплитуды донных сигналов выполняется в зонах стробирующих импульсов. Для УЗК шейки рельса стробирующие импульсы располагают в зоне второго донного сигнала, для УЗК головки - как в зоне первого, так и в зоне второго донного сигнала. Далее оцифрованный сигнал передается в компьютер сбора данных СОНОТРОН™-ЕМАТ 880 DACQ (Sonotron 880 DACQ), который сохраняет и отображает информацию по амплитуде донных сигналов в зонах, указанных выше стробирующих импульсов, в виде В-сканов по всей длине контролируемого рельса.
Схема измерительных каналов УЗК приведена на рисунке 2.
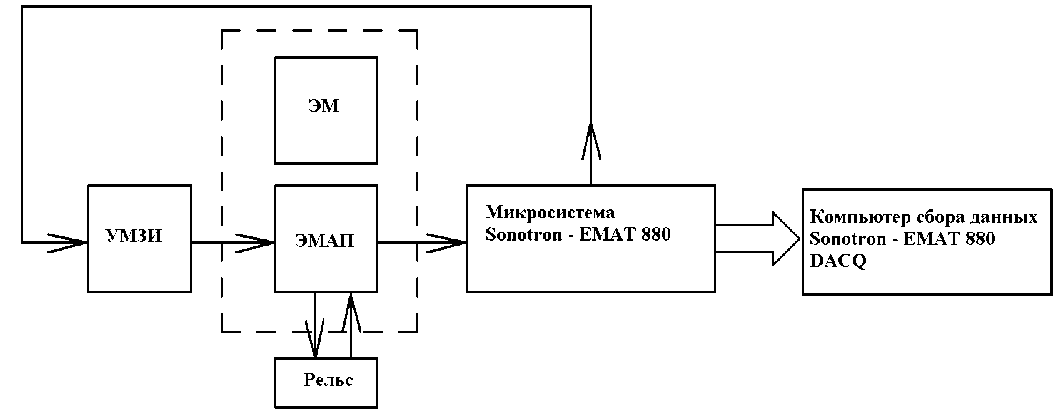
Рисунок 2 - Схема измерительного канала УЗК
Система предназначена для контроля рельсов типа: P43; P50; P65; P65K; UIC54; UIC60;
S49; 136RE.
Программное обеспечение
Программное обеспечение (ПО), входящее в состав системы, выполняет функции отображения на экране персонального компьютера информации в удобном для оператора виде, а также задания условий измерения.
Защита ПО от преднамеренных и непреднамеренных воздействий соответствует уровню «С» по МИ 3286-2010.
Идентификационные данные ПО приведены в таблице 1.
Таблица 1.
|
Наименование программного обеспечения |
Идентиф икацион-ное наименование программного обеспечения |
Номер версии (идентификационный номер) программного обеспечения |
Цифровой идентификатор программного обеспечения (контрольная сумма исполняемого кода) |
Алгоритм вычисления цифрового идентификатора программного обеспечения |
|
ПО контроля |
Sonotron-880 MS |
1.50 |
3d3d9c9eb346b289d253e 33f0b9a16a895660169 |
SHA-1 |
|
ПО контроля |
Sonotron -880 DACQ |
1.178 |
7cc3f1105dc7fb8518cc e41a7ff079c218496c77 |
SHA-1 |
Технические характеристики
Метрологические и технические характеристики приведены в таблице 2.
Таблица 2.
|
Наименование параметра |
Значение параметра |
|
Минимальный размер выявляемого дефекта, мм |
48 |
|
Разрешающая способность измерения положения дефекта по длине объекта контроля, мм |
5 |
|
Диапазон измерения координат дефекта относительно переднего торца рельса, мм |
50 - 105000 |
|
Пределы допускаемого значения абсолютной погрешности измерения координат дефекта относительно переднего торца рельса, мм |
±50 |
|
Скорость транспортировки рельса через зону контроля, м/с |
1,5 |
|
Пределы допускаемого значения относительной погрешности установки скорости транспортировки рельса через зону контроля, % |
±10 |
|
Номинальная частота заполнения зондирующих импульсов, МГц |
1,5 — 2,0 |
|
Предельное отклонение от номинального значения частоты заполнения зондирующих импульсов, % |
±10 |
|
Длительность зондирующего импульса, мкс |
4 - 10 |
|
Номинальное значение частоты следования зондирующих импульсов, Гц |
600 - 2000 |
|
Погрешность измерения отношения амплитуд сигналов на входе приемника, дБ |
±2 |
|
Отношение сигнал/шум при зазоре (2,0 ^ 2,5) мм, дБ, не менее: для канала Тор1 для каналов Тор2, Side1, Side2 |
28 20 |
|
Масса системы, не более, кг |
3600 |
|
Г абаритные размеры, длина х ширина х высота, мм |
3300х2400х3000 |
|
Срок службы, лет, не менее |
8 |
|
Питание системы: напряжение, В частота, Гц |
187 - 242 50 ± 1 |
|
Условия эксплуатации: - температура окружающего воздуха, 0С - влажность, % - давление, кПа |
5 - 40 20 - 80 90 - 110 |
Знак утверждения типа
наносится на титульный листе руководства по эксплуатации в правом верхнем углу методом печати и на маркировочную бирку системы с помощью наклейки.
Комплектность
|
В комплект поставки системы входят: | |
|
ЭМАП |
4 шт. |
|
Система управления ЭМАП |
4 шт. |
|
Компьютер микросистемы обработки данных Sonotron 880 MS |
1 шт. |
|
Пульт управления оператора |
1 шт. |
|
Компьютер сбора данных Sonotron 880 DACQ |
1 шт. |
|
Руководство по эксплуатации |
1 экз. |
|
Методика поверки |
1 экз. |
Поверка
осуществляется в соответствии с методикой поверки «Система ультразвукового контроля СОНОТРОН™-ЕМАТ 880. Методика поверки» МП 30.Д4-12, утвержденная ГЦИ СИ ФГУП «ВНИИОФИ» в феврале 2011 г.
Основные средства поверки:
1. Осциллограф С1-103, полоса пропускания усилителя вертикальног отклонения от 0 до 10 МГц при коэффициенте отклонения 20 мВ/деление - 0,5 мВ/деление и 1 МГц при коэффициенте отклонения 0,2 мВ/деление - 0,05 мВ/деление; коэффициент развертки от 0,1 мкс/деление до 0,5 мкс/деление и с внешней емкостью 5 с/деление, с пятикратной растяжкой; коэффициент перекрытия диапазонов 2 и 2,5; погрешность коэффициентов отклонения 4%;
2. Комплект мер моделей дефектов СОП1Р, номинальное значение ширины МД (моделей дефектов) и его отклонение (0,5+0,1) мм, номинальные значения глубины МД и их отклонения (1,0+0,1) мм и (1,5+0,1) мм, номинальные значения длины МД и их отклонения (20,0+0,5) мм и (10,0+0,5) мм;
3. Ультразвуковой тестер МХ01-УЗТ-1 по ГОСТ 23667-85.
Сведения о методах измерений
Используются для прямых измерений в соответствии с методикой, изложенной в руководстве по эксплуатации «Система контроля вихревым током СОНОТРОН™-ЕМАТ 880. Руководство по эксплуатации».
Нормативные документы
Техническая документация фирмы NDT Technologies Inc., Канада.
Рекомендации к применению
Выполнение работ по оценке соответствия промышленной продукции и продукции других видов, а также иных объектов установленным законодательством РФ обязательным требованиям.
Смотрите также



