



Системы измерений параметров автомобильных транспортных средств в движении GlobalWIM


| Номер в ГРСИ РФ: | 57957-14 |
|---|---|
| Производитель / заявитель: | Компания "STERELA SAS", Франция |
| 57957-14: Описание типа СИ | Скачать | 133 КБ |
Системы измерений параметров автомобильных транспортных средств в движении GlobalWIM (далее - Системы GlobalWIM) предназначены для измерений общей массы транспортного средства (далее - ТС), массы, приходящейся на ось и на ось в группе осей движущегося ТС, скорости, габаритных размеров, расстояний между осями ТС.
Информация по Госреестру
| Основные данные | |
|---|---|
| Номер по Госреестру | 57957-14 |
| Наименование | Системы измерений параметров автомобильных транспортных средств в движении |
| Модель | GlobalWIM |
| Год регистрации | 2014 |
| Страна-производитель | Франция |
| Информация о сертификате | |
| Срок действия сертификата | 22.07.2019 |
| Тип сертификата (C - серия/E - партия) | C |
| Дата протокола | Приказ 1105 п. 28 от 22.07.2014 |
Производитель / Заявитель
Компания "STERELA SAS", Франция
Франция
Поверка
| Методика поверки / информация о поверке | МП РТ 2014-2013 |
| Межповерочный интервал / Периодичность поверки | 1 год |
| Актуальность информации | 20.04.2025 |
Поверители
Скачать
| 57957-14: Описание типа СИ | Скачать | 133 КБ |
Описание типа
Назначение
Системы измерений параметров автомобильных транспортных средств в движении GlobalWIM (далее - Системы GlobalWIM) предназначены для измерений общей массы транспортного средства (далее - ТС), массы, приходящейся на ось и на ось в группе осей движущегося ТС, скорости, габаритных размеров, расстояний между осями ТС.
Описание
Принцип действия Систем GlobalWIM основан на преобразовании сигналов, возникающих при воздействии ТС на модули Систем при проезде через измерительный участок Систем.
Системы GlobalWIM представляют собой измерительные информационные системы, имеют модульную структуру и состоят из:
- весоизмерительного модуля (пьезоэлектрические датчики, блок обработки сигналов пьезоэлектрических датчиков);
- модуля обнаружения ТС, измерения длины и скорости ТС (индукционные контуры, блок обработки сигналов индукционных контуров);
- модуля позиционирования ТС на полосе движения (пьезополимерные датчики, блок обработки сигналов пьезополимерных датчиков);
- блока обработки и управления MDM (далее - блок MDM);
- видеотерминала;
- промышленного компьютера;
- сервера Системы GlobalWIM;
- блока электропитания.
Дополнительно Системы GlobalWIM могут комплектоваться оптическим лазерным устройством для определения высоты и ширины ТС.
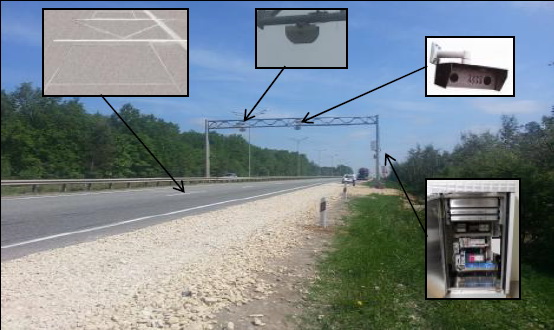
Общий вид Систем GlobalWIM показан на рисунке 1.
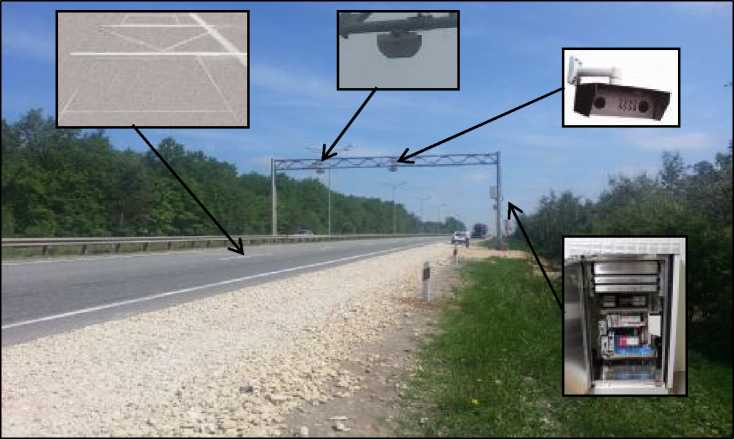
Рисунок 1 - Общий вид Систем GlobalWIM
Принципы действия модулей:
- весоизмерительный модуль преобразует сигналы, возникающие при проезде ТС через пьезоэлектрические датчики, в аналоговые сигналы, параметры которых изменяются пропорционально нагрузке и времени прохождения ТС между датчиками. Пьезоэлектрические датчики монтируются в дорожное полотно перпендикулярно направлению движения ТС на определенном расстоянии друг от друга и позволяют определить общую массу ТС, массу, приходящуюся на каждую ось ТС, расстояние между осями ТС, количество осей ТС, скорость и ускорение ТС;
- модуль обнаружения ТС, измерения длины и скорости ТС преобразует сигналы, возникающие при проезде ТС через индукционные контуры, в аналоговые сигналы, параметры которых изменяются пропорционально длине и скорости ТС. Индукционные контуры монтируются в дорожное полотно перед пьезоэлектрическими датчиками и представляют собой незамкнутые медные провода в виде 4-х витковой петли. Индукционные контуры предназначены для обнаружения ТС в зоне контроля Системы GlobalWIM, определения его длины и скорости;
- модуль позиционирования ТС на полосе движения преобразует сигналы, возникающие при проезде ТС через пьезополимерные датчики, расположенные под углом к направлению проезда ТС, в аналоговые сигналы, параметры которых изменяются при перестроении ТС или отклонении от полосы движения. Данный модуль позволяет определить положение ТС на полосе движения, получить информацию о количестве колес на оси ТС:
- оптическое лазерное устройство преобразует сигналы, возникающие при непрерывном сканировании дорожного полотна и движущегося ТС, в аналоговые сигналы, параметры которых изменяются пропорционально высоте и ширине ТС.
Блок MDM преобразует аналоговые сигналы, поступающие от модулей системы в цифровые сигналы. Преобразованные цифровые сигналы передаются на промышленный компьютер.
Видеотерминал оборудован видеокамерами и устройством инфракрасной подсветки. Изображения с видеокамер, содержащие общий вид ТС и местоположение относительно зоны контроля передаются на промышленный компьютер для их дальнейшего анализа, обработки, хранения и отображения.
Промышленный компьютер с установленным программным обеспечением обрабатывает, анализирует цифровые сигналы, полученные от блока MDM, передает на сервер Системы GlobalWIM информацию об измеренных и рассчитанных параметрах ТС.
Элементы управления и обеспечения работы Систем GlobalWIM устанавливаются в шкафу управления. Шкаф управления располагается рядом с местом установки датчиков и индукционных контуров. Шкаф управления механически защищен от несанкционированного доступа к блоку MDM и промышленному компьютеру. Защита от несанкционированного доступа к блоку MDM обеспечивается пломбой. Место пломбирования показано на рисунке 2.

Рисунок 2 - Место пломбирования
Оптическое лазерное устройство монтируется над полосой и позволяет измерить высоту и ширину движущегося ТС.
Лист № 3
Всего листов 6
Рабочий диапазон температур Систем GlobalWIM обеспечивается внутренним подогревом видеокамер, шкафа управления и оптического лазерного устройства.
Программное обеспечение
Программное обеспечение (далее - ПО) установлено на промышленный компьютер и блок обработки и управления MDM и предназначено для сбора, обработки, оценки, хранения и дальнейшей передачи информации.
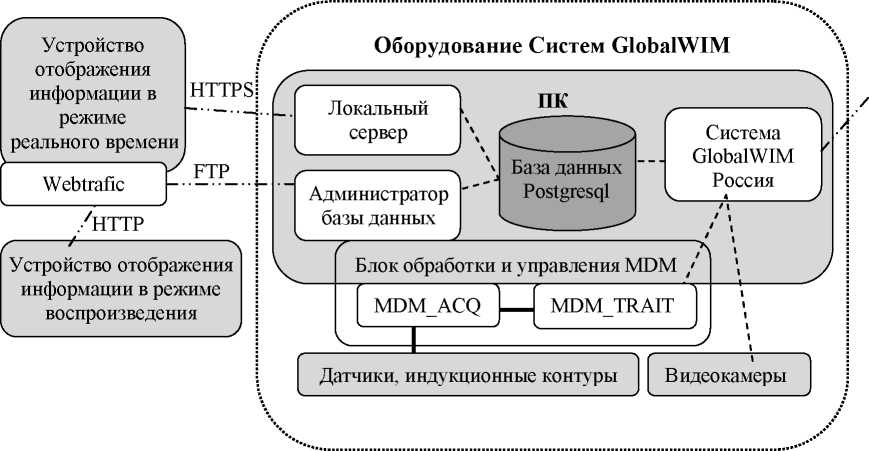
Структура ПО представлена на рисунке 3.
Сервер заказчика
Условные обозначения
Интернет
Рисунок 3 - Структура ПО Систем GlobalWIM
Функции ПО:
1) MDM_ACQ - сбор данных с датчиков и индукционных контуров;
2) MDM_TRAIT - формирование значений измерений каждого ТС, на основании данных, полученных через MDM_ACQ;
3) Система GlobalWIM Россия - установление связи между полученными результатами измерений и изображением ТС, хранение информации в базе данных, отправка информации на сервер заказчика;
4) Администратор базы данных - отправка полученной информации о ТС на сервер Webtrafic и очистка базы данных;
5) Локальный сервер - отправка полученной информации о ТС на устройство отображения информации в режиме реального времени;
6) Webtrafic - отображение полученной информации о ТС и ее отправка на устройство отображения информации в режиме воспроизведения.
Установка и техническое обслуживание ПО осуществляется фирмой-изготовителем. Вход в ПО осуществляется авторизированными пользователями и защищен паролем. Результаты измерений защищены от преднамеренных и непреднамеренных изменений с помощью контрольной суммы.
Лист № 4
Всего листов 6
Версии ПО и контрольные суммы отображаются на главной странице устройства отображения информации, а также могут быть получены из базы данных. Доступ к базе данных осуществляется авторизированными пользователями.
Уровень защиты программного обеспечения от непреднамеренных и преднамеренных изменений «С» в соответствии МИ 3286-2010.
Идентификационные данные программного обеспечения представлены в таблице 1.
Таблица 1
|
Наименование программного обеспечения |
Идентификационное наименование программного обеспечения |
Номер версии (идентификационный номер) программного обеспечения |
Цифровой идентификатор программного обеспечения (контрольная сумма) |
Алгоритм вычисления цифрового идентификатора программного обеспечения |
|
1 |
2 |
3 |
4 |
5 |
|
Программное обеспечение блока обработки и управления MDM |
MDM_ACQ |
601 |
1561 |
CRC-8 бит |
|
MDM_TRAIT |
352 |
ca82 |
CRC-8 бит | |
|
Система GlobalWIM Россия |
GlobalWIM Russie |
1.X.X |
479fSe4ddc0060fS19 5a7b9be8e03d38 |
MD5, 128 бит |
|
Администратор базы данных |
Администратор базы данных |
1.0.0 |
085c8f9789fc0fe9556 407920072efac |
MD5, 128 бит |
Технические характеристики
Метрологические и технические характеристики Систем GlobalWIM приведены в таблице 2.
Таблица 2
|
№ п/п |
Наименование характеристики |
Значение |
|
1 |
2 |
3 |
|
1 |
Диапазон измерений общей массы ТС, кг |
от 3 500 до 200 000 |
|
2 |
Максимальная масса, приходящаяся на ось ТС, кг |
30 000 |
|
3 |
Минимальная масса, приходящаяся на ось ТС, кг |
1 000 |
|
4 |
Дискретность отсчета измерения массы, приходящейся на ось, кг |
1 |
|
5 |
Дискретность отсчета, измерения общей массы ТС, кг |
1 |
|
6 |
Пределы допускаемой относительной погрешности при измерении общей массы ТС, % |
± 4 |
|
7 |
Пределы допускаемой относительной погрешности при измерении массы, приходящейся на ось ТС, % |
± 9 |
|
8 |
Пределы допускаемой относительной погрешности при измерении массы, приходящейся на ось в группе осей ТС, % |
± 9 |
|
9 |
Пределы допускаемой погрешности измерения скорости ТС до 100 км/ч включительно св. 100 км/ч |
± 2 км/ч ± 2 % от измеренной скорости |
|
10 |
Пределы допускаемой погрешности при измерении расстояния между осями ТС, мм |
± 30 |
|
1 |
2 |
3 |
|
11 |
Пределы допускаемой абсолютной погрешности измерения габаритных размеров ТС, мм - длины - ширины - высоты |
± 500 ± 300 ± 60 |
|
12 |
Размеры зоны контроля полосы движения, м: - длина - ширина |
6 4 |
|
13 |
Рабочий диапазон измерения скорости, км/ч |
от 5 до 250 |
|
14 |
Диапазон скоростей, при которых обеспечивается точность измерения массы, км/ч |
от 10 до 160 |
|
15 |
Диапазон температур окружающей среды, при котором поддерживается рабочий диапазон температур шкафа управления, °C |
от минус 40 до плюс 70 |
|
16 |
Рабочий диапазон температур пьезоэлектрических датчиков, °C |
от минус 40 до плюс 80 |
|
17 |
Рабочий диапазон температур дополнительного оборудования, °С |
от минус 30 до плюс 50 |
|
18 |
Относительная влажность, % |
до 100 |
|
19 |
Параметры электрического питания от сети переменного тока: - напряжение, В - частота, Гц - потребляемая мощность, не более, Вт |
100-240 45-65 700 |
Знак утверждения типа
наносится типографским способом на титульный лист Руководства по эксплуатации.
Комплектность
Комплектность средства измерений указана в таблице 3.
Таблица 3
|
Наименование |
Количество |
|
Система GlobalWIM |
1 шт. |
|
Руководство по эксплуатации |
1 экз. |
|
Методика поверки МП РТ 2014-2013 |
1 экз. |
Поверка
осуществляется по документу МП РТ 2014-2013 «Системы измерений параметров автомобильных транспортных средств в движении GlobalWIM. Методика поверки», утвержденному ГЦИ СИ ФБУ «Ростест-Москва» 07 октября 2013 г.
Основное поверочное оборудование:
- весы автомобильные для поосного взвешивания с максимальной нагрузкой Max не более 20 000 кг, с поверочным делением e не более 50 кг;
- весы автомобильные для поколесного взвешивания с максимальной нагрузкой Max не более 10 000 кг, с поверочным делением e не более 50 кг;
- весы автомобильные неавтоматического действия с максимальной нагрузкой Max не менее 40 000 кг, с поверочным делением e не более 50 кг;
- дальномеры лазерные с диапазоном измерений 0,20 м - 30,00 м и пределом допускаемой погрешности измерений не более ± 5 мм или рулетки металлические с диапазоном измерений от 0 до 20 м и пределом допускаемой погрешности измерений не более ± 5 мм;
- измерители скорости с диапазоном измерений от 10 км/ч до 160 км/ч и пределом допускаемой погрешности не более ± 1 км/ч;
- эталонные ТС: двухосные, многоосные (тягач с прицепом, трейлер).
Сведения о методах измерений
Методика выполнения измерений изложена в Руководстве по эксплуатации.
Нормативные документы
1. МИ 2060-90 «ГСИ. Государственная поверочная схема для средств измерений длины в диапазоне 1*10-6...50 м и длин в диапазоне 0.2....50 мкм».
2. ГОСТ 8.021-2005 «ГСИ. Государственная поверочная схема для средств измерений массы».
Рекомендации к применению
- вне сферы государственного регулирования обеспечения единства измерений.
Смотрите также



