



Системы ультразвукового контроля SONOTRON™ - ЕМАТ 880

| Номер в ГРСИ РФ: | 60259-15 |
|---|---|
| Производитель / заявитель: | Фирма "NDT Technologies Inc.", Канада |
Системы ультразвукового контроля SONOTRON™ - ЕМАТ 880 (далее по тексту -системы) предназначены для измерения координат дефектов в области головки и шейки рельс ультразвуковым импульсным зеркально-теневым методом.
Информация по Госреестру
| Основные данные | |
|---|---|
| Номер по Госреестру | 60259-15 |
| Действует | по 01.04.2020 |
| Наименование | Системы ультразвукового контроля |
| Модель | SONOTRON™ - ЕМАТ 880 |
| Код идентификации производства |
ОС
СИ не соответствует критериям подтверждения производства на территории
РФ в соответствии с постановлением №719
|
| Характер производства | Серийное |
| Идентификатор записи ФИФ ОЕИ | e6a02f26-cdc1-35ac-1cdf-f81f999e69bd |
Производитель / Заявитель
Фирма "NDT Technologies Inc.", Канада
Поверка
| Межповерочный интервал / Периодичность поверки |
1 год
|
| Зарегистрировано поверок | |
| Найдено поверителей | |
| Успешных поверок (СИ пригодно) | 8 (100%) |
| Неуспешных поверок (СИ непригодно) | 0 (0 %) |
| Актуальность информации | 14.12.2025 |
Поверители
Скачать
|
60259-15: Описание типа
2015-60259-15.pdf
|
Скачать | 139.2 КБ | |
|
60259-15: Методика поверки
2022-mp60259-15.pdf
|
Скачать | 608.2 КБ |
Описание типа
Назначение
Системы ультразвукового контроля SONOTRON™ - ЕМАТ 880 (далее по тексту -системы) предназначены для измерения координат дефектов в области головки и шейки рельс ультразвуковым импульсным зеркально-теневым методом.
Описание
Принцип действия систем основан на зеркально-теневом методе ультразвукового контроля. В качестве метода возбуждения и приема ультразвуковых колебаний применяется бесконтактный электромагнитно-акустический (ЭМА) метод, который уменьшает влияние окалины и других загрязнений поверхности рельса на результаты контроля. Данный метод основан на эффекте преобразования высокочастотных электромагнитных колебаний в акустические колебания (и наоборот) поверхностью металла в постоянном магнитном поле.
При пропускании через обмотку электромагнитно-акустических преобразователей (ЭМАП) импульсов тока ультразвуковой частоты на поверхности рельса возникает вихревой ток. Взаимодействие вихревого тока с внешним магнитным полем электромагнита приводит к возникновению ультразвуковых колебаний поверхности рельса, которая, тем самым, превращается в излучатель ультразвука. Прошедшие через изделие и отраженные от противоположной поверхности ультразвуковые колебания снова вызывают колебания поверхности рельса под ЭМАП. Поскольку эта поверхность тоже находится в магнитном поле электромагнита, её колебания приводят к возникновению тока на поверхности рельса, который трансформируется в обмотку приемного ЭМАП. Таким образом, при использовании ЭМАП излучателем и приемником ультразвука становится сама поверхность рельса, расположенная в зоне действии обмоток преобразователей.
На рисунке 1 представлена фотография общего вида системы. В системе
устанавливаются от одного до трех верхних ЭМАП (ТОР) и два боковых ЭМАП - по одному с
каждой стороны контролируемого рельса (SIDE).
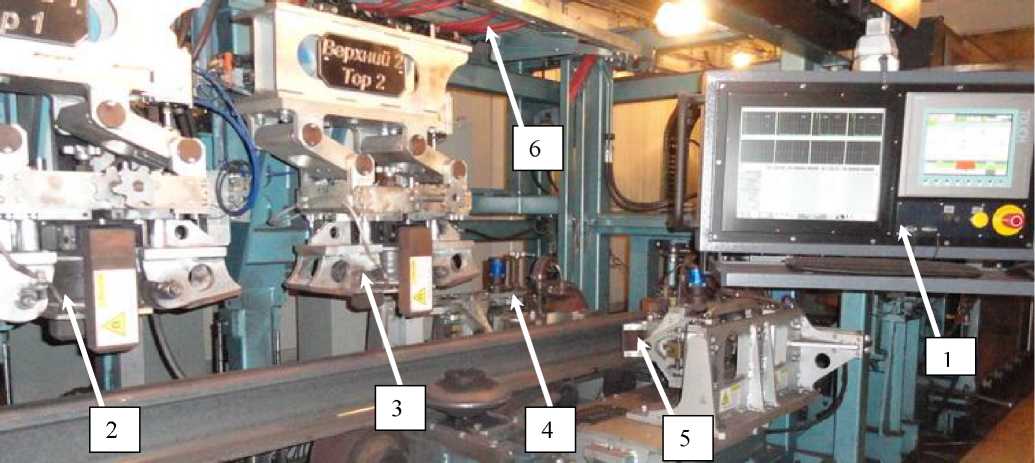
Рисунок 1 - Общий вид системы
На рисунке 1 цифрами обозначены: 1 - пульт управления; 2 - ЭМАП «ТОР 1»; 3 - ЭМАП «ТОР 2»; 4 - ЭМАП «SIDE 1»; 5 - ЭМАП «SIDE 2»; 6 - компьютер микросистемы SONOTRON™ - ЕМАТ 880
По каждому синхроимпульсу компьютера микросистемы SONOTRON™ - ЕМАТ 880 (Sonotron 880 ETMS) во всех каналах одновременно с заданной вручную частотой заполнения и длительностью формируются радиоимпульсы, которые усиливаются в усилителе мощности зондирующих импульсов (УМЗИ). С выхода УМЗИ радиоимпульс поступает на соответствующий ЭМАП, расположенный под полюсом электромагнита (ЭМ). ЭМ создает магнитное поле, ориентированное по нормали к поверхности контролируемого изделия. Витки рабочей части ЭМАП параллельны поверхности изделия, поэтому в результате взаимодействия постоянного магнитного поля с полем вихревых токов в изделии возникают поперечные ультразвуковые колебания. Эти колебания распространяются в направлении противоположной поверхности рельса. Принятый ЭМАП сигнал подается на соответствующий вход микросистемы SONOTRON™ - ЕМАТ 880, усиливается с заданным коэффициентом усиления, оцифровывается и отображается на экране компьютера микросистемы SONOTRON™ - ЕМАТ 880 в виде А-скана. Анализ амплитуды донных сигналов выполняется в зонах стробирующих импульсов. Для УЗК шейки рельса стробирующие импульсы располагают в зоне второго донного сигнала, для УЗК головки - как в зоне первого, так и в зоне второго донного сигнала. Далее оцифрованный сигнал передается в компьютер сбора данных SONOTRON™ - ЕМАТ 880 DACQ (Sonotron 880 DACQ), который сохраняет и отображает информацию по амплитуде донных сигналов в зонах, указанных выше стробирующих импульсов, в виде В-сканов по всей длине контролируемого рельса.
Схема измерительных каналов УЗК приведена на рисунке 2.
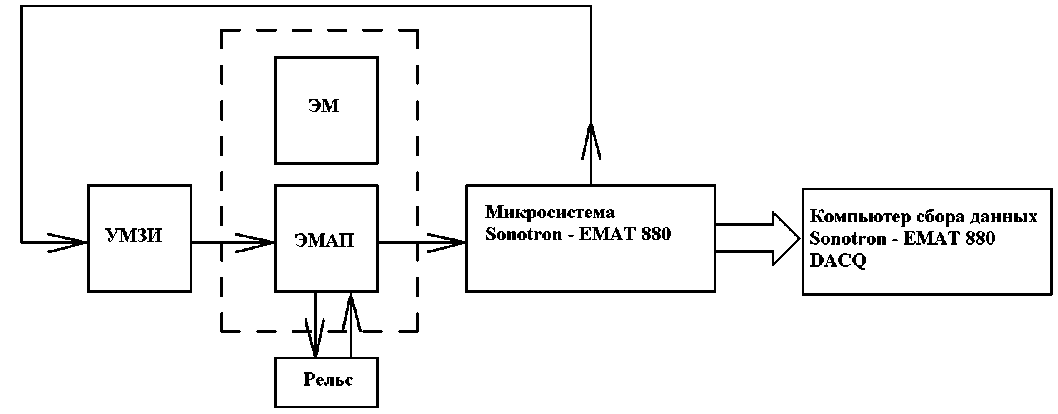
Рисунок 2 - Схема измерительного канала УЗК
Системы предназначены для контроля рельсов типа: P43; P50; P65; P65K; P75; UIC54; UIC60; S49; 136RE. Минимальная длина контролируемых рельсов 12,5 метров. Максимальная длина контролируемых рельсов 125 метров для единичных рельсов и 800 метров для сварных рельсов.
Программное обеспечение
Программное обеспечение (ПО), входящее в состав систем, выполняет функции управления системой, обработки результатов измерений, создания и сохранения файлов с данными контроля, протоколов контроля, файлов настроек, формирования отчетов в реальном времени,
Защита ПО от преднамеренных и непреднамеренных воздействий соответствует уровню «средний» согласно Р 50.2.077-2014.
Идентификационные признаки ПО систем приведены в таблице 1.
Таблица 1
|
Идентиф икационное наименование ПО |
Номер версии (идентификационн ый номер) ПО |
Цифровой идентификатор ПО (контрольная сумма исполняемого кода) |
Алгоритм вычисления цифрового идентикатора ПО |
|
SONOTRON EMAT - 880 ETMS |
1.56 и выше |
- |
- |
|
SONOTRON EMAT - 880 DACQ |
1.186 и выше |
- |
- |
Технические характеристики
Таблица 2
|
Наименование характеристики |
Значение |
|
Диапазон измерения координат дефекта относительно переднего торца рельса, мм |
От 0,5 • 102 до 8 • 105 |
|
Минимальный размер выявляемого дефекта, мм |
50 |
|
Пределы допускаемого значения абсолютной погрешности измерения координат дефекта относительно переднего торца рельса, мм |
± 0,5 • 102 |
|
Скорость транспортировки рельса через зону контроля, м/с |
От 0 до 2,0 |
|
Диапазон установки частоты заполнения зондирующих импульсов, МГц |
От 1,5 до 2,0 |
|
Допускаемое отклонение установки частоты заполнения зондирующих импульсов, % |
± 10 |
|
Диапазон установки длительности зондирующих импульсов, мкс |
От 4 до 10 |
|
Пределы допускаемой абсолютной погрешности измерения отношения амплитуд сигналов на входе приемника, дБ |
± 2 |
|
Условная чувствительность, дБ, не менее: - для каналов ТОР (по амплитуде второго донного импульса от поверхности основания подошвы рельса); - для каналов SIDE (по минимальной амплитуде первого и второго донных импульсов от боковой поверхности головки рельса) |
- 12 - 12 |
|
Масса системы, не более, т |
3,6 |
|
Г абаритные размеры, длина х ширина х высота, м |
3,8 х 2,7 х 3,0 |
|
Срок службы, лет, не менее |
8 |
|
Питание системы осуществляется от сети переменного тока с - напряжением, В; - частотой, Гц |
От 207 до 256 50 ± 1 |
|
Условия эксплуатации: - температура окружающего воздуха, °С - относительная влажность воздуха при 25 °С, % |
От 10 до 35 До 80 |
Знак утверждения типа
Знак утверждения типа наносится на титульный лист руководства по эксплуатации в правом верхнем углу типографским методом и на маркировочную бирку системы методом наклеивания этикетки.
Комплектность
Таблица 3
|
Наименование и условное обозначение |
Количество |
|
Система ультразвукового контроля SONOTRON™ - ЕМАТ 880 |
1 шт. |
|
Руководство по эксплуатации |
1 экз. |
|
Методика поверки |
1 экз. |
Поверка
осуществляется согласно методике поверки NDTT.3631251.102894 МП «Системы ультразвукового контроля SONOTRON™ - ЕМАТ 880. Методика поверки», утвержденной ФГУП «ВНИИОФИ» в сентябре 2014 г.
Основные средства поверки:
1 Осциллограф универсальный двухлучевой С1-103. Полоса пропускания от 0 до 10 МГц. Коэффициент отклонения от 0,5 мВ/дел до 20 В/дел, пределы основной погрешности коэффициентов отклонения ± 4 %. Коэффициент развертки от 0,04 мкс/дел до 5 с/дел, пределы основной погрешности коэффициентов разверток ± 4 %.
2 Мера моделей дефектов SOPR-NDT-02. Длина группы сверлений MH1, MH2, MW1, MW2 (50,0 ± 2,0) мм, расстояние до осей симметрии группы сверлений MH1, MH2, MW1, MW2 от 50 до 1000 мм от переднего и заднего торцов меры.
3 Тестер ультразвуковой МХ01-УЗТ-1. Размах напряжения высокочастотного сигнала на нагрузке 50 Ом (2,0 ± 0,3) B. Диапазон ослабления аттенюатора от 0 до 96 дБ. Пределы допускаемой абсолютной погрешности на частоте 10 МГц ± (0,1+0,0075^N) дБ, где N - значение устанавливаемого ослабления в дБ.
Сведения о методах измерений
Используются для прямых измерений в соответствии с методикой, изложенной в руководстве по эксплуатации «Система ультразвукового контроля SONOTRON™ - ЕМАТ 880. Руководство по эксплуатации».
Нормативные документы
Техническая документация компании NDT Technologies Inc., Канада.
Рекомендации к применению
При выполнении работ по оценке соответствия продукции и иных объектов обязательным требованиям в соответствии с законодательством Российской Федерации о техническом регулировании.
Смотрите также




