



Системы мобильного сканирования АГМ-МС7


| Номер в ГРСИ РФ: | 64259-16 |
|---|---|
| Производитель / заявитель: | ООО "АГМ Системы", г.Краснодар |
Системы мобильного сканирования АГМ-МС7 (далее - системы) предназначены для измерений азимута и дальности от центра сканирования до точки отражения лазерных лучей от объекта и дальнейшего построения на основе результатов измерений цифровой трехмерной модели поверхности реальных сканируемых объектов.
Информация по Госреестру
| Основные данные | |
|---|---|
| Номер по Госреестру | 64259-16 |
| Действует | по 16.06.2021 |
| Наименование | Системы мобильного сканирования |
| Модель | АГМ-МС7 |
| Характер производства | Серийное |
| Идентификатор записи ФИФ ОЕИ | 9484802c-ff2f-cea7-feed-b245e6be61e3 |
Производитель / Заявитель
ООО "АГМ Системы", РОССИЯ, г.Краснодар
Поверка
| Межповерочный интервал / Периодичность поверки |
1 год
|
| Зарегистрировано поверок | |
| Найдено поверителей | |
| Успешных поверок (СИ пригодно) | 6 (100%) |
| Неуспешных поверок (СИ непригодно) | 0 (0 %) |
| Актуальность информации | 04.01.2026 |
Поверители
Скачать
|
64259-16: Описание типа
2016-64259-16.pdf
|
Скачать | 103.4 КБ | |
|
64259-16: Методика поверки
2016-mp64259-16.pdf
|
Скачать | 775.9 КБ |
Описание типа
Назначение
Системы мобильного сканирования АГМ-МС7 (далее - системы) предназначены для измерений азимута и дальности от центра сканирования до точки отражения лазерных лучей от объекта и дальнейшего построения на основе результатов измерений цифровой трехмерной модели поверхности реальных сканируемых объектов.
Описание
Системы изготавливаются в двух модификациях 2100 и 3180. Модификации отличаются моделью используемой сканирующей головы PENTAX S2100 и PENTAX S3180. У модификации 2100 максимальная дальность 119 м, максимальная скорость вращения сканирующего зеркала 200 оборотов в секунду, у модификации 3180 максимальная дальность 187,3 м, максимальная скорость вращения сканирующего зеркала 50 оборотов в секунду.
Конструктивно системы представляют из себя совокупность лазерного дальнометрическо-го сканера, системы инерциальной навигации (состоящей из высокоточных GNSS приемника и инерциальной системы) и сферической панорамной камеры. Системы предназначены для установки на автомобильный, железнодорожный или водный виды транспорта и позволяют обеспечить детальность и четкость сканирования (выполнение требований в части метрологических характеристик) при скоростях транспортного средства до 80 км/ч.
При движении транспортного средства, на которое установлена система, в трехмерном пространстве сканирующий пучок импульсного лазерного излучения направляется на объекты местности в плоскости, перпендикулярной оси вращения зеркала. Отраженные сигналы регистрируются приемником излучения и преобразуются в цифровую форму. Для сканирования используется вращающееся зеркало, угол поворота которого измеряется оптическим кодовым датчиком (энкодером), установленным на оси вращения.
Система инерциальной навигации определяет координаты системы мобильного сканирования относительно исходных геодезических пунктов в заданной системе координат с помощью GNSS приемника входящего в ее состав и в дальнейшем с помощью инерциальной системы (состоящей из триады акселерометров и триады высокоточных волоконно-оптических гироскопов) фиксируются угловые скорости и линейные ускорения, по которым рассчитываются текущие значения углов пространственной ориентации системы. В дальнейшем определение координат сканируемого объекта осуществляется относительно ранее измеренных координат системы мобильного сканирования.
Сферическая панорамная камера осуществляет фотосъемку в процессе работы оборудования.
Данные всех компонентов системы синхронизируются по времени и записываются во внутреннюю память. Управление системой в движении осуществляется оператором с компьютера, который связан кабельными соединениями с системой. Определение взаимного положения антенны GNSS приемника и инерциальной системы производится при изготовлении системы с использованием средств измерений, не входящих в состав системы. Ориентация системы координат инерциальной системы относительно блока сканера вычисляется при заводской калибровке системы.
При постобработке по данным инерциальной навигационной системы вычисляется вектор скорости в заданной системе координат, а по данным лазерного сканера строится цифровая трехмерная модель сканируемых объектов.
Внешний вид системы с указанием места пломбировки от несанкционированного доступа и места нанесения знака утверждения типа приведен на рисунках 1 и 2.
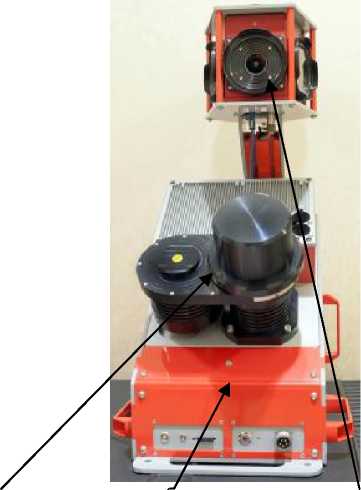
а б в
а - сканер
б - система инерциальной навигации
в - камера
Рисунок 1 - Внешний вид системы со стороны передней панели
а б
а - место пломбировки
б - место нанесения наклейки со знаком утверждения типа (задняя панель)
Рисунок 2 - Внешний вид системы сзади
Программное обеспечение
Программное обеспечение (ПО) AGM Scan Control используется для управления компонентами АГМ-МС7 в процессе съемки. Запуск и контроль работы лазерного сканера, панорамной камеры и системы инерциальной навигации осуществляются в одном окне программы. Оператор имеет возможность оценивать корректность получаемых данных и менять настройки компонентов системы (частоту сканирования, частоту вращения сканирующего зеркала, частоту фотографирования и т.п.).
ПО AGM Scan Explorer используется для загрузки полученных данных из памяти компонентов АГМ-МС7 в память компьютера для дальнейшей передачи на камеральную обработку.
ПО Novatel Inertial Explorer используется для расчета траектории в режиме постобработки по данным системы инерциальной навигации, базовых станций, точным эфемеридам спутников навигационных систем и другой вспомогательной информации. Программа предоставляет большой набор инструментов анализа полученного решения и дает возможность оценить точность по многочисленным графикам и отчетам.
ПО AGM Scan Works используется для вывода точек лазерного отражения, панорамных снимков и параметров внешнего ориентирования панорамных снимков в системе координат UTM. В ПО применяются данные калибровки ориентации и смещения сканера и камеры относительно системы координат инерциальной системы и коррекция времени (вычисляются при заводской калибровке системы). В качестве исходных данных используется траектория, вычисленная в ПО Novatel Inertial Explorer, и измеренные данные со сканера и панорамной камеры.
ПО ms7_fw установлено на сенсорном блоке и используется для синхронизации компонентов системы.
Идентификационные данные ПО приведены в таблице 1.
Таблица 1
|
Идентиф икационное данные (признаки) |
Значение | ||||
|
Идентиф икационное наименование ПО |
ms7_fw |
AGM ScanControl |
AGM ScanExplorer |
AGM ScanWorks |
Novatel Inertial Explorer |
|
Номер версии (идентификационный номер ПО) |
2.0 и выше |
2.0 и выше |
1.0 и выше |
4.0 и выше |
8.5 и выше |
|
Цифровой идентификатор ПО |
- |
- |
- |
- |
- |
Метрологически значимая часть ПО систем и измеренные данные достаточно защищены с помощью специальных средств защиты от преднамеренных изменений.
Защита ПО от непреднамеренных и преднамеренных изменений соответствует уровню «Высокий» в соответствии с Р 50.2.077-2014.
Технические характеристики
Таблица 2
|
Наименование характеристики |
Значение характеристики | |
|
Диапазон измерений дальности, м |
от 0,3 до 119 для версии 2100 |
от 0,3 до 187,3 для версии 3180 |
|
Пределы допускаемой абсолютной погрешности измерений дальности, мм |
±3,1 | |
|
Пределы допускаемой абсолютной погрешности определения координат точек отражения лазерного импульса, мм: - в плане - по высоте |
±30 ±30 | |
|
Диапазон сканирования в горизонтальной плоскости |
от 0 до 360° для версии 2100 |
от 0 до 320° для версии 3180 |
|
Напряжение питания постоянного тока, В: - внешний источник питания постоянного тока (Li-Ion аккумулятор) |
от 11 до 18 | |
|
Диапазон рабочих температур, °С |
от 0 до 45 | |
|
Габаритные размеры (длинахширинахвысота), мм, не более |
495x272x732 | |
|
Масса, кг, не более |
31 | |
Знак утверждения типа
наносится в виде наклейки на заднюю панель системы и на титульный лист руководства по эксплуатации типографским способом.
Комплектность
Комплект поставки приведен в таблице 3.
Таблица 3
|
Наименование |
Количество, шт. |
|
1 Система мобильного сканирования АГМ-МС7 в составе: |
1 компл. |
|
- лазерная сканирующая система |
1 шт. |
|
- сферическая панорамная камера |
1 шт. |
|
- система инерциальной навигации (со съемной GNSS антенной) |
1 шт. |
|
- кабель питания сенсорного блока |
1 шт. |
|
2 Программное обеспечение ms7 fw |
1 шт. |
|
3 Программное обеспечение AGM ScanControl (на компакт-диске) |
1 шт. |
|
4 Программное обеспечение AGM ScanExplorer (на компакт-диске) |
1 шт. |
|
5 Программное обеспечение AGM ScanWorks (на компакт-диске) |
1 шт. |
|
6 Программное обеспечение Novatel Inertial Explorer (на компактдиске) |
1 шт. |
|
8 Руководство по эксплуатации АГМ-МС7.РЭ (на компакт-диске) |
1 шт. |
|
9 Паспорт |
1 шт. |
|
10 Методика поверки АГМ-МС7. 001 МП |
1 шт. |
Поверка
осуществляется в соответствии с документом «АГМ-МС7» 001 МП «Инструкция. Системы мобильного сканирования АГМ-МС7. Методика поверки», утвержденным первым заместителем генерального Директора - заместителем по научной работе ФГУП «ВНИИФТРИ» 18 декабря 2015 г.
Основные средства поверки:
- пространственный эталонный полигон, погрешность при измерениях приращения координат в плане и по высоте находится в пределах ±5 мм, при измерениях длин линий находится в пределах ±5 мм
- эталон длины 1-го разряда по государственной поверочной схеме ГОСТ Р 8.750-2011 -тахеометр электронный, допускаемое СКП измерений углов - 0,5", допускаемое СКП измерений расстояний - 1+1-10-6-D мм, где D измеряемое расстояние в мм.
Знак поверки наносится на свидетельство о поверке в виде наклейки или оттиска поверителя и на заднюю панель системы.
Сведения о методах измерений
С истема мобильного сканирования АГМ-МС7. Руководство по эксплуатации
АГМ-МС7.РЭ.
Нормативные документы
1 ГОСТ Р 53606-2009 «ГНСС. Методы и технологии выполнения геодезических и землеустроительных работ. Метрологическое обеспечение. Основные положения».
2 ГОСТ Р 8.750-2011«Государственная система обеспечения единства измерений. Государственная поверочная схема для координатно-временных средств измерений».
3 Система мобильного сканирования АГМ-МС7. Технические условия ТУ 443351-001-29612876-15.
Смотрите также




