



Системы измерений вибрационные балансировочные ВИБРОЛАБ



| Номер в ГРСИ РФ: | 84333-22 |
|---|---|
| Категория: | Станки балансировочные |
| Производитель / заявитель: | ООО "Энсет", г.Ростов-на-Дону |
Системы измерений вибрационные балансировочные ВИБРОЛАБ (далее по тексту -системы) предназначены для измерения частоты вращения ротора и амплитуды виброперемещения в составе балансировочных станков с целью последующего расчета значения и угла дисбаланса, корректирующей массы.
Информация по Госреестру
| Основные данные | |
|---|---|
| Номер по Госреестру | 84333-22 |
| Действует | по 11.01.2027 |
| Наименование | Системы измерений вибрационные балансировочные |
| Модель | ВИБРОЛАБ |
| Код идентификации производства |
ОС
СИ не соответствует критериям подтверждения производства на территории
РФ в соответствии с постановлением №719
|
| Характер производства | Серийное |
| Идентификатор записи ФИФ ОЕИ | f57383a3-28be-9005-53fd-c96498b3ca0a |
Производитель / Заявитель
ООО "Энсет" , РОССИЯ, г. Ростов-на-Дону
РОССИЯ
Поверка
| Межповерочный интервал / Периодичность поверки |
1 год
|
| Зарегистрировано поверок | |
| Найдено поверителей | |
| Успешных поверок (СИ пригодно) | 57 (100%) |
| Неуспешных поверок (СИ непригодно) | 0 (0 %) |
| Актуальность информации | 26.07.2026 |
Поверители
Скачать
|
84333-22: Описание типа
2022-84333-22.pdf
|
Скачать | 328.6 КБ | |
|
84333-22: Методика поверки
2022-mp84333-22.pdf
|
Скачать | 2.5 MБ |
Описание типа
Назначение
Системы измерений вибрационные балансировочные ВИБРОЛАБ (далее по тексту -системы) предназначены для измерения частоты вращения ротора и амплитуды виброперемещения в составе балансировочных станков с целью последующего расчета значения и угла дисбаланса, корректирующей массы.
Описание
Принцип действия систем основан на преобразовании вибрации опорных стоек балансировочного станка в электрический сигнал, пропорциональный виброперемещению, с дальнейшим расчетом в автоматическом режиме значения и угла дисбаланса для балансируемого изделия (ротора), а также значения корректирующей массы. Значение и угол дисбаланса рассчитывается с помощью определяемых коэффициентов влияния используя относительные значения электрического сигнала.
Измерение амплитуды виброперемещения осуществляется при помощи пьезоэлектрических и (или) емкостных акселерометров, устанавливаемых по одному в каждой из опорных стоек балансировочного станка. В качестве акселерометров могут применяться пьезоэлектрические или емкостные акселерометры. В дальнейшем в основном блоке происходит цифровая фильтрация сигналов, поступающих от первичных преобразователей, определение частоты вращения ротора и текущего углового положения балансируемого ротора, а также выделение амплитуд и фаз колебаний на частоте вращения ротора и расчет значений дисбалансов и их углов в каждой плоскости ротора по методу векторных коэффициентов влияния, расчет корректирующих масс.
Дополнительно системы имеют функцию измерения частоты вращения ротора при помощи лазерного отметчика оборотов, а также функцию контроля угла поворота ротора с использованием датчика угла (инкрементальный энкодер), устанавливаемого на привод балансировочного станка.
Конструктивно системы представляют из себя основной блок, в едином корпусе которого размещены дисплей, измерительный модуль, блок питания, материнская плата, вентилятор и жесткий диск, а также устанавливаемые на опорах и приводе станка первичные преобразователи, соединяемые с основным блоком линиями связи.
Системы применяются для целей динамической и статической балансировки жестких, квазижестких и гибких роторов в составе дорезонансных или зарезонансных вертикальных или горизонтальных балансировочных станков с одной, двумя, тремя или четырьмя плоскостями коррекции. Системы позволяют определять начальный дисбаланс перед балансировкой и остаточный дисбаланс после проведения балансировки с оцениванием его соответствия установленным допустимым значениям.
Системы содержат базу данных балансируемых изделий с набором установленных исходных параметров. Имеется возможность пополнения базы данных, а также ручного ввода исходных параметров для расчета дисбаланса и корректирующих масс.
В качестве устройства ввода и вывода информации используется жидкокристаллический сенсорный дисплей, расположенный на передней части основного блока.
Результаты измерений и расчетов сохраняются в энергонезависимой памяти (жестком диске) и могут быть переданы по интерфейсам USB (записаны на съемный носитель) и по локальной компьютерной сети (протокол TCP-IP). Также системы поддерживают вывод информации о проведенной балансировке на принтеры, подключаемые по USB и TCP-IP.
Системы имеют возможность управления частотно-регулируемыми приводами асинхронных электродвигателей по протоколу Modbus. По устойчивости к воздействию температуры и влажности окружающего воздуха системы соответствуют условиям УХЛ 4.2 по ГОСТ 15150-69.
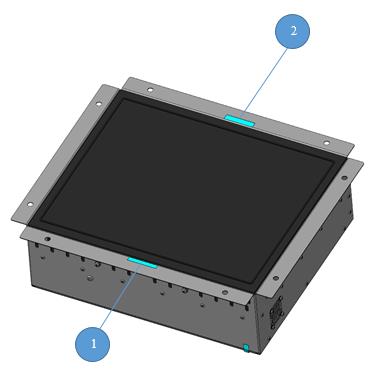
Корпус систем пломбируется легкоразрушаемыми наклейками в 4 местах.
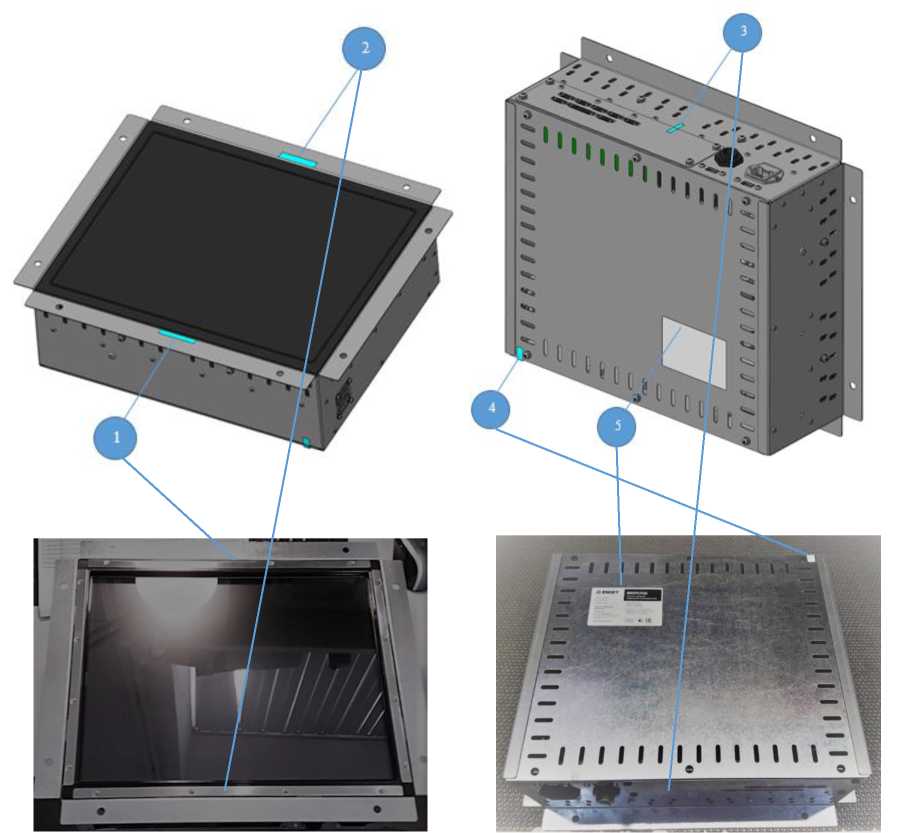
1- 4 - легкоразрушаемые наклейки; 5 - наклейка производителя. Рисунок 1 - Общий вид систем и места опломбирования
Программное обеспечение
Метрологически значимая часть программного обеспечения (ПО) систем находится в микропроцессоре, прошивка которого осуществляется при изготовлении систем. Наличие механической защиты не позволяет считать или модифицировать ПО в процессе эксплуатации.
Конструкция СИ исключает возможность несанкционированного влияния на ПО СИ и измерительную информацию.
Таблица 1 - Идентификационные данные ПО
|
Идентификационные данные (признаки) |
Значение |
|
Идентификационное наименование ПО |
ВИБРОЛАБ-ПО |
|
Номер версии (идентификационный номер) ПО |
4.х |
|
Цифровой идентификатор ПО |
не используется |
|
Алгоритм вычисления цифрового идентификатора ПО |
- |
|
Другие идентификационные данные (если имеются) |
- |
где х - число, идентифицирующее номер версии метрологически незначимой части ПО.
Защита ПО от непреднамеренных и преднамеренных изменений соответствует уровню «высокий» согласно Р 50.2.077-2014.
Технические характеристики
Таблица 2 - Метрологические характеристики
|
Наименование параметра |
Значение |
|
Количество измерительных каналов виброперемещения, шт. |
от 1 до 4* |
|
Диапазон измерений амплитуды виброперемещения, мкм |
от 1 до 1000 включ. |
|
Пределы допускаемой относительной погрешности измерений амплитуды виброперемещения, % |
±3 |
|
Диапазон измерений частоты вращения ротора, об/мин |
от 180 до 30000 включ. |
|
Пределы допускаемой погрешности измерений частоты вращения ротора, об/мин, где n - число оборотов ротора |
±(1+0,0025-n) |
|
Диапазон определяемых дисбалансов, гмм/кг (мкм) |
от 0,1 до 500 включ. |
|
Диапазон рабочих частот, Гц |
от 3 до 500 включ. |
* - количество измерительных каналов виброперемещения определяется при заказе
Таблица 3 - Основные технические характеристики
|
Наименование параметра |
Значение |
|
Потребляемая мощность, ВА, не более |
100 |
|
Параметры электропитания от сети переменного тока: - напряжение переменного тока, В |
от 187 до 242 |
|
- частота, Гц |
от 49 до 51 |
|
Диапазон рабочих температур, °С |
от +10 до +35 |
|
Габаритные размеры основного блока, мм, не более - высота |
370 |
|
- ширина |
125 |
|
- длина |
430 |
|
Масса основного блока, кг, не более |
15 |
|
Средняя наработка на отказ, ч, не менее |
40000 |
|
Средний срок службы, лет |
25 |
Знак утверждения типа
наносится полиграфическим методом на наклейку, размещаемую на задней панели основного блока и в паспорт методом печати.
Комплектность
Таблица 3 - Комплектность средства измерений
|
1 |
Основной блок |
1 шт. |
|
2 |
Руководство по эксплуатации |
1 экз. |
|
3 |
Паспорт |
1 экз. |
|
4 |
Методика поверки МП 256 - 2021 |
1 экз. |
Сведения о методах измерений
приведены в разделе 1.4 руководства по эксплуатации.
Нормативные документы
Приказ Росстандарта от 27.12.2018 № 2772 г. «Об утверждении государственной
поверочной схемы для средств измерений виброперемещения, виброскорости, виброускорения и углового ускорения».
Приказ Росстандарта от 31.07.2018 № 1621 г. «Об утверждении государственной
поверочной схемы для средств измерений для средств измерений времени и частоты».
ТУ 26.51-001-38447005-2021 «Системы измерений вибрационные балансировочные ВИБРОЛАБ. Технические условия»