



Системы измерений параметров автомобильных транспортных средств в движении UnicamWIM

| Номер в ГРСИ РФ: | 52647-13 |
|---|---|
| Производитель / заявитель: | Фирма "CAMEA, spol. s r.o.", Чехия |
Информация по Госреестру
| Основные данные | |
|---|---|
| Номер по Госреестру | 52647-13 |
| Действует | по 03.11.2027 |
| Наименование | Системы измерений параметров автомобильных транспортных средств в движении |
| Модель | UnicamWIM |
| Характер производства | Серийное |
| Идентификатор записи ФИФ ОЕИ | 2ba4c16e-d964-26f9-4fc8-abde9a24ad1e |
| Год регистрации | 2013 |
| Общие данные | |
|---|---|
| Год регистрации | 2013 |
| Страна-производитель | Чехия |
| Информация о сертификате | |
| Срок действия сертификата | 01.02.2018 |
| Тип сертификата (C - серия/E - партия) | C |
| Дата протокола | Приказ 59 п. 51 от 01.02.2013 |
Производитель / Заявитель
САМЕА spol. sr.о., Чешская Республика
Чехия
Поверка
| Методика поверки / информация о поверке | МП РТ 1781-2012 |
| Межповерочный интервал / Периодичность поверки |
1 год
|
| Зарегистрировано поверок | |
| Найдено поверителей | |
| Успешных поверок (СИ пригодно) | 845 (92%) |
| Неуспешных поверок (СИ непригодно) | 70 (8 %) |
| Актуальность информации | 04.01.2026 |
Поверители
Скачать
|
52647-13: Описание типа
2020-52647-13.pdf
|
Скачать | 1016.2 КБ | |
|
52647-13: Методика поверки
2020-mp52647-13.pdf
|
Скачать | 3.5 MБ | |
| Свидетельство об утверждении типа СИ | Открыть | ... |
Описание типа
Назначение
Системы измерений параметров автомобильных транспортных средств в движении типа UnicamWIM (далее - системы UnicamWIM) предназначены для измерений в автоматическом режиме нагрузки на ось, на ось в группе осей, группу осей, общей массы, габаритных размеров транспортного средства (далее - ТС), расстояний между осями ТС, значений текущего времени, синхронизированного с национальной шкалой времени UTC (SU).
Описание
Принцип действия систем UnicamWIM основан на преобразовании сигналов пьезоэлектрических датчиков, оптических лазерных устройств и сигналов индукционных контуров, возникающих при проезде ТС через измерительный участок систем UnicamWIM.
Системы UnicamWIM состоят из следующих основных и дополнительных модулей.
Основные модули:
- весоизмерительный модуль (пьезоэлектрические датчики, блок обработки сигналов пьезоэлектрических датчиков);
- модуль обнаружения и измерения длины ТС (индукционные контуры, блок обработки сигналов индукционных контуров);
- промышленный компьютер с программным обеспечением UnicamWIM Driver;
- блок электропитания.
Дополнительные модули:
- оптическое лазерное устройство для измерения высоты, ширины и длины ТС;
- модуль позиционирования ТС на полосе движения;
- сервер системы UnicamWIM;
- модуль фото-видеофиксации и распознавания государственного регистрационного знака (далее - ГРЗ);
- термометр для измерения температуры дорожного полотна;
- датчик превышения высоты ТС;
- модуль синхронизации времени;
- роутер для сетевых подключений;
- GSM модем;
- Wi-Fi модуль;
- модуль подогрева/охлаждения шкафа управления;
- блок бесперебойного питания;
- информационное табло.
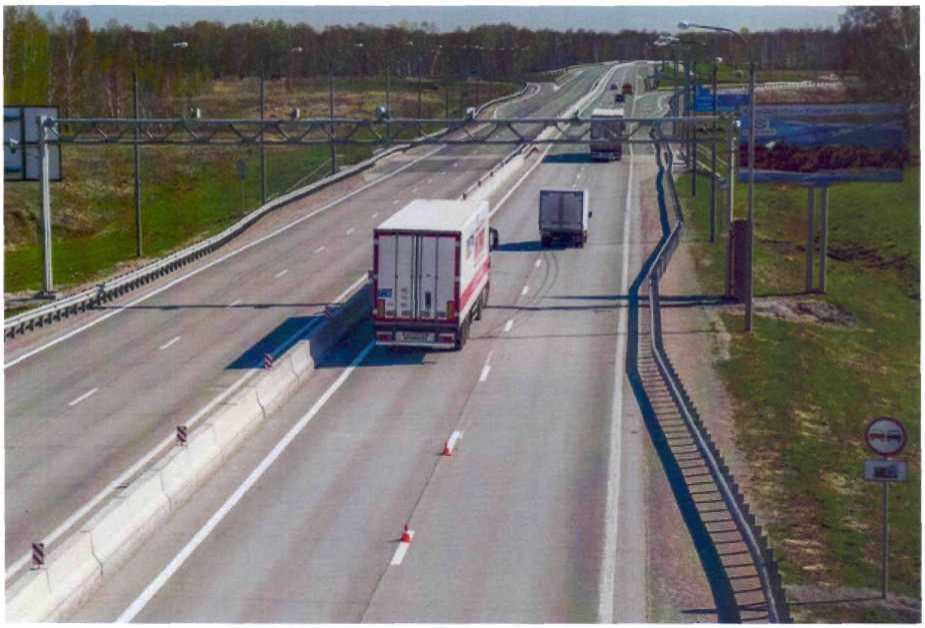
Рисунок 1 - Общий вид системы UnicamWIM
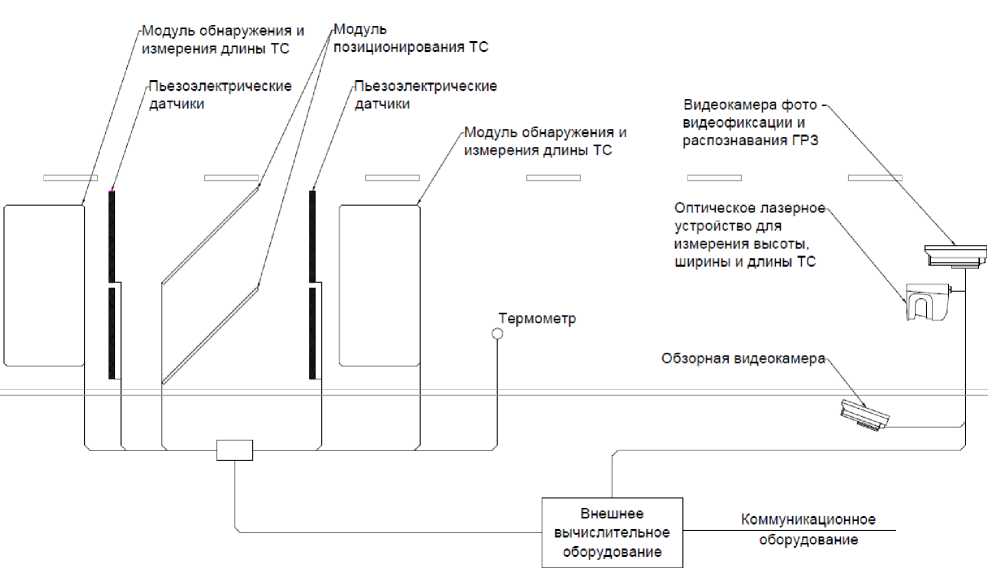
Рисунок 2 - Схематический вид системы UnicamWIM

Рисунок 3 - Шкаф управления системы UnicamWIM с блоком обработки сигналов UC-WLU (пример)

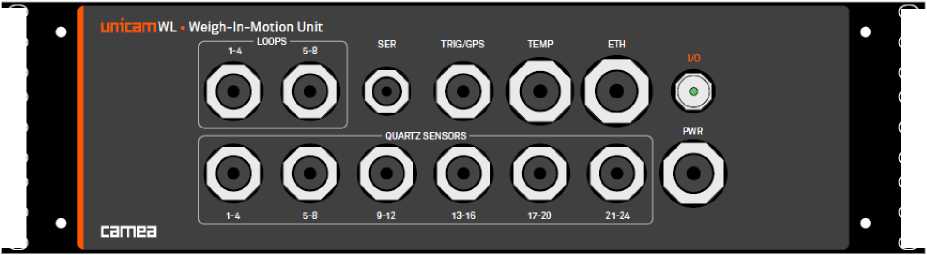
Рисунок 5 - Блок обработки сигналов UC-WLU
000000000
000000000

Рисунок 6 - Блок обработки сигналов UC-ZPU
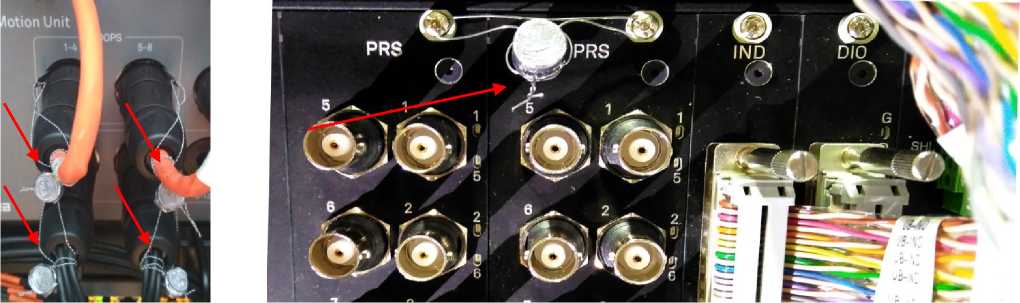
Рисунок 7 - Места пломбировки блоков обработки сигналов UC-WLU и UC-ZPU в шкафу управления
Принцип действия основных модулей:
- весоизмерительный модуль преобразует сигналы, возникающие при проезде ТС через пьезоэлектрические датчики, в аналоговые сигналы, параметры которых изменяются пропорционально нагрузке и времени прохождения ТС между датчиками.
Пьезоэлектрические датчики монтируются в дорожное полотно перпендикулярно направлению движения ТС на определенном расстоянии друг от друга и позволяют определить массу, приходящуюся на каждую ось ТС, расстояние между осями ТС, количество осей ТС, скорость и ускорение ТС. На основе полученных результатов измерений производится расчет общей массы ТС массы, приходящейся на группу осей;
- модуль обнаружения и измерений длины ТС преобразует сигналы, возникающие при проезде ТС через индукционные контуры, в аналоговые сигналы, параметры которых изменяются пропорционально длине и скорости ТС. Индукционные контуры монтируются в дорожное полотно перед пьезоэлектрическими датчиками и представляют собой незамкнутые медные провода в виде 4-х витковой петли. Индукционные контуры предназначены для обнаружения ТС в зоне контроля системы UnicamWIM, определения его длины.
Принцип действия дополнительных модулей:
- оптическое лазерное устройство преобразует сигналы, возникающие при непрерывном сканировании дорожного полотна и движущегося ТС, в аналоговые сигналы, параметры которых изменяются пропорционально высоте и ширине ТС. Оптические лазерные устройства жестко закреплены на П- или Г-образной опорах и монтируются над дорожным полотном. Оптические лазерные устройства позволяют измерить высоту, ширину и длину движущегося ТС;
- в модуль фото-видеофиксации входят видеокамеры фото- видеофиксации и распознавания ГРЗ (устанавливаются сбоку от автомобильной дороги или над автомобильной дорогой, видеокамеры оснащены инфракрасными прожекторами) и обзорные видеокамеры для фотофиксации общего вида ТС в момент проезда через пьезоэлектрические датчики (устанавливаются сбоку от автомобильной дороги или над дорогой). Изображения с видеокамер передаются на промышленный компьютер для дальнейшей обработки, анализа и передачи на сервер. Функции модуля фото-видеофиксации и распознавания ГРЗ могут быть реализованы с использованием видеокамер производителя САМЕА с установленным программным обеспечением или видеокамер аппаратно-программных комплексов утвержденного типа «АвтоУраган-ВСМ2» (рег. № 77054-19);
- модуль позиционирования ТС на полосе движения преобразует сигналы, возникающие при проезде ТС через пьезополимерные кабели, расположенные под углом к направлению проезда ТС, в аналоговые сигналы, параметры которых изменяются при перестроении ТС или отклонении от полосы движения. Данный модуль позволяет определить положение ТС на полосе движения, получить информацию о количестве колес на оси ТС.
Аналоговые сигналы с пьезоэлектрических датчиков и индукционных контуров поступают в блоки обработки сигналов, конструктивно объединенные в одном устройстве -блоке обработки и управления. Блок обработки и управления служит для сбора, анализа и преобразования аналоговых сигналов в цифровые сигналы об общей массе ТС, о массе, приходящейся на каждую ось ТС, на ось в группе осей, расстояниях между осями, длине ТС, дате и времени проезда, скорости, ускорении, количестве осей. Преобразованные цифровые сигналы передаются на промышленный компьютер.
Промышленный компьютер с установленным программным обеспечением обрабатывает, анализирует цифровые сигналы, полученные от блока обработки и управления, передает на сервер системы UnicamWIM информацию об измеренных и рассчитанных параметрах ТС.
Элементы управления и обеспечения работы систем UnicamWIM устанавливаются в шкафу управления. Шкаф управления располагается рядом с местом установки пьезоэлектрических датчиков и индукционных контуров. Защита системы UnicamWIM от несанкционированного доступа к блокам обработки сигналов UC-WLU и UC-ZPU обеспечивается пломбами или пломбировочными наклейками (Рисунок 7).
Сервер системы UnicamWIM состоит из компьютера и базы данных. Информация о параметрах ТС, полученных элементами системы UnicamWIM, хранится на сервере системы UnicamWIM. Доступ к базе данных осуществляется авторизированными пользователями.
Термометр для измерений температуры дорожного полотна используется для температурной линеаризации и компенсации пьезоэлектрических датчиков в зависимости от актуальной температуры дороги.
Регистрация времени проезда ТС через зону контроля осуществляется с помощью записи текущего времени, синхронизированного с национальной шкалой времени UTC (SU) с сигналами глобальных навигационных спутниковых систем ГЛОНАСС/GPS, в сохраняемые кадры фото-видеофиксации ТС.
Рабочий диапазон температур систем UnicamWIM обеспечивается внутренним подогревом видеокамер, оптических лазерных устройств и шкафа управления.
Системы осуществляют процедуры самодиагностики для выявления возможных ошибок и подтверждения корректности измерений.
Системы UnicamWIM выпускаются в нескольких вариантах исполнения и имеют следующее обозначение:
UnicamWIM.A.B, при этом:
- значение «А» присутствует при использовании блока обработки сигналов UC-ZPU;
- значение «В» присутствует при использовании оптических лазерных устройств для измерения длины, ширины и высоты ТС.
Программное обеспечение
Программное обеспечение (далее - ПО) системы UnicamWIM является встроенным и полностью метрологически значимым.
Идентификационным признаком ПО служит номер версии, который отображается на дисплее при включении системы UnicamWIM.
Защита от несанкционированного доступа к ПО, настройкам и данным измерений обеспечивается авторизацией пользователя с помощью пароля.
ПО не может быть изменено без нарушения пломбы и переключения переключателя.
Программное обеспечение систем UnicamWIM (далее - ПО) предназначено для сбора, обработки, оценки, хранения и дальнейшей передачи информации, поступающей с модулей систем UnicamWIM. ПО устанавливается на промышленный компьютер с операционной системой Microsoft Windows XP/Vista/Seven/10. При включении компьютера запускается ПО, версия ПО отображается автоматически. Установка и техническое обслуживание ПО осуществляются фирмой-изготовителем. Вход в ПО осуществляется авторизированными пользователями и защищен паролем. Результаты измерений защищены от преднамеренных и непреднамеренных изменений с помощью контрольной суммы. Контрольная сумма создается индивидуально для каждого результата измерений.
Таблица 1 - Идентификационные данные программного обеспечения
|
Идентификационные данные (признаки) |
Значение |
|
Идентификационное наименование ПО |
Программное обеспечение UnicamWIM Driver |
|
Номер версии (идентификационный номер) ПО |
2.XXX.011 |
|
Цифровой идентификатор ПО |
5556efd8addfff0blc43a5305f45561e |
|
Алгоритм вычисление цифрового идентификатора ПО |
MD5, 128 бит |
|
Другие идентификационные данные, если имеются |
UnicamWIM Driver |
Уровень защиты программного обеспечения «высокий» в соответствии с Р 50.2.077-2014.
Технические характеристики
Таблица 2 - Метрологические характеристики
|
Наименование характеристики |
Значение |
|
Диапазон измерений общей массы ТС, кг |
От N х 1000 до N х 20000 и свыше, где N -количество осей ТС |
|
Диапазон измерений массы, приходящейся на группу осей ТС, кг |
От G х 1000 до G х 20000 и свыше, где G -количество осей ТС в группе |
|
Максимальная масса, приходящаяся на ось ТС, кг |
35 000 |
|
Минимальная масса, приходящаяся на ось ТС, кг |
1 000 |
|
Дискретность отсчета измерений массы, приходящейся на ось, кг |
1 |
|
Дискретность отсчета измерений общей массы ТС, кг |
1 |
|
Пределы допускаемой относительной погрешности измерений общей массы ТС, % |
±5 |
|
Пределы допускаемой относительной погрешности измерений массы, приходящейся на ось ТС, % |
±10 |
|
Пределы допускаемой относительной погрешности измерений массы, приходящейся на группу осей ТС, % |
±10 |
|
Пределы допускаемой относительной погрешности измерений массы, приходящейся на ось в группе осей ТС, % |
±11 |
|
Пределы допускаемой абсолютной погрешности измерений расстояния между осями ТС, мм |
±30 |
|
Диапазоны измерений габаритных размеров ТС, м длины ширины высоты |
от 3 до 32 от 1,6 до 5 от 1,6 до 5 |
|
Пределы допускаемой абсолютной погрешности измерений габаритных размеров ТС, мм длины ширины высоты |
±600 ±100 ±60 |
|
Диапазон скоростей, при которых обеспечивается точность измерений общей массы, массы, приходящейся на ось, на группу осей, на ось в группе осей ТС, габаритных размеров, расстояний между осями, км/ч |
от 5 до 140 |
|
Определение значений текущего времени относительно шкалы времени UTC (SU), ч |
от 0 до 24 |
|
Пределы допускаемой абсолютной погрешности привязки текущего времени к шкале времени UTC (SU), с |
± 2 |
Таблица 3 - Основные технические характеристики
|
Наименование характеристики |
Значение |
|
Размеры зоны контроля полосы движения, м длина ширина |
6 4 |
|
Диапазон температур окружающей среды, при котором поддерживается рабочий диапазон температур шкафа управления, °С |
от -40 до +70 |
|
Условия эксплуатации: - рабочий диапазон температур пьезоэлектрических датчиков, °С - рабочий диапазон температур дополнительных внешних модулей, °С - относительная влажность воздуха, % |
от -40 до +80 от -40 до +60 до 100 |
|
Параметры электрического питания от сети переменного тока: | |
|
- напряжение, В |
от 100 до 242 |
|
- частота, Гц |
от 45 до 65 |
|
- потребляемая мощность, В^А, не более |
1500 |
Знак утверждения типа
наносится типографским способом на титульный лист Руководства по эксплуатации.
Комплектность
Таблица 4 - Комплектность средства измерений
|
Наименование |
Обозначение |
Количество |
|
Система измерений параметров автомобильных транспортных средств в движении |
UnicamWIM |
1 шт. |
|
Руководство по эксплуатации |
- |
1 экз. |
|
Паспорт |
- |
1 экз. |
|
Методика поверки |
МП РТ 1781-2012 (с Изменением № 2) |
1 экз. |
Поверка
осуществляется по документу МП РТ 1781-2012 (с Изменением №2) «ГСИ. Системы измерений параметров автомобильных транспортных средств в движении типа UnicamWIM. Методика поверки», утвержденному ФБУ «Ростест-Москва» 13 августа 2020 г.
Основное поверочное оборудование:
весы автомобильные для поосного взвешивания с максимальной нагрузкой Мах не более 20 000 кг, с поверочным делением е не более 50 кг;
весы автомобильные для поколесного взвешивания с максимальной нагрузкой Мах не более 10 000 кг, с поверочным делением е не более 50 кг;
весы автомобильные неавтоматического действия с максимальной нагрузкой Мах не менее 40 000 кг, с поверочным делением е не более 50 кг;
дальномеры лазерные с диапазоном измерений от 0,2 до 30 м и пределом допускаемой погрешности измерений ±5 мм или рулетки металлические с длиной шкалы 20 м и пределом допускаемой погрешности измерений ±5 мм;
дальномеры лазерные Leica DISTO X310 (регистрационный номер в Федеральном информационном фонде 50417-12) или рулетки измерительные 3-го класса точности со шкалой номинальной длины не менее 30 м по ГОСТ 7508-98;
приемники временной синхронизации NV08C-CSM-N24MS (регистрационный номер в Федеральном информационном фонде 63278-16).
- эталонные ТС: трехосные (четырехосные), многоосные (тягач с прицепом, трейлер).
Допускается применение аналогичных средств поверки, обеспечивающих определение метрологических характеристик поверяемых средств измерений с требуемой точностью.
Знак поверки наносится на свидетельство о поверке в виде оттиска поверительного клейма или наклейки.
Сведения о методах измерений
приведены в эксплуатационном документе.
Нормативные документы
Приказ Росстандарта от 29.12.2018 № 2840 Об утверждении государственной
поверочной схемы для средств измерений длины в диапазоне от 1-10-9 до 100 м и длин волн в диапазоне от 0,2 до 50 мкм
Приказ Росстандарта от 29.12.2018 № 2818 Об утверждении государственной
поверочной схемы для средств измерений массы
Приказ Росстандарта от 31 июля 2018 года № 1621 Об утверждении государственной поверочной схемы для средств измерений времени и частоты
Приказ Росстандарта от 29 декабря 2018 года № 2831 Об утверждении государственной поверочной схемы для координатно-временных средств измерений
Приказ Министерства внутренних дел Российской Федерации от 08.11.2012 №1014 (в ред. приказа МВД от 20.01.2015 № 32) Об утверждении перечня измерений, относящихся к
сфере государственного регулирования обеспечения единства измерений, и обязательных метрологических требований к ним.
Техническая документация изготовителя САМЕА spol. s г.о.
Смотрите также




{kind=link}