



Системы измерительные многоцелевые «Пульсар»






























| Номер в ГРСИ РФ: | 79560-20 |
|---|---|
| Производитель / заявитель: | ООО «Форт Крафт», г. Санкт-Петербург |
Системы измерительные многоцелевые «Пульсар» (далее - системы, СИМ «Пульсар») предназначены для измерений скорости движения приближающихся и удаляющихся транспортных средств (далее - ТС), а также для измерений текущего времени, синхронизированного с национальной шкалой времени UTC(SU), измерений интервалов времени, измерений текущих навигационных параметров и определения на их основе координат систем.
Информация по Госреестру
| Основные данные | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Номер по Госреестру | 79560-20 | |||||||||
| Действует | по 06.11.2030 | |||||||||
| Наименование | Системы измерительные многоцелевые | |||||||||
| Модель | «Пульсар» | |||||||||
| Приказы |
№2010 от
19.09.2025
— О продлении срока действия утвержденных типов средств измерений
№2831 от
23.12.2025
— О внесении изменений в сведения об утвержденных типах средств измерений
|
|||||||||
| Код идентификации производства |
ОС
СИ не соответствует критериям подтверждения производства на территории
РФ в соответствии с постановлением №719
|
|||||||||
| Характер производства | Серийное | |||||||||
| Идентификатор записи ФИФ ОЕИ | 4687f74c-6f93-010a-e8c7-cd99f1a58b9c | |||||||||
| Испытания |
|
|||||||||
Производитель / Заявитель
ООО «Форт Крафт», РОССИЯ, 97349, г. Санкт-Петербург, вн. тер. г. Муниципальный округ Озеро Долгое, пр-кт Комендантский, д.9,литера А, помещ.4-Н; ООО «СофИТ», РОССИЯ, 355042, Ставропольский край, г. Ставрополь, Старомарьевское ш., д. 32, помещ. 316
РОССИЯ
Поверка
| Методика поверки / информация о поверке |
МП 651-25-052 Государственная система обеспечения единства измерений. Системы измерительные многоцелевые «Пульсар». Методика поверки
(с 23.12.2025)
|
| Межповерочный интервал / Периодичность поверки |
2 года
|
| Зарегистрировано поверок |
3333
|
| Найдено поверителей | |
| Успешных поверок (СИ пригодно) | 3319 (100%) |
| Неуспешных поверок (СИ непригодно) | 14 (0 %) |
| Актуальность информации | 19.07.2026 |
Поверители
Скачать
|
79560-20: Описание типа
2024-79560-20-2.pdf
Файл устарел
|
Скачать | 565.5 КБ | |
|
79560-20: Методика поверки
2020-mp79560-20.pdf
Файл устарел
|
Скачать | 929 КБ | |
|
79560-20: Описание типа
2025-79560-20.pdf
Файл устарел
|
Скачать | 597 КБ | |
|
79560-20: Описание типа
2025-79560-20-1.pdf
Файл устарел
|
Скачать | 597 КБ | |
|
79560-20: Методика поверки
2020-mp79560-20-1.pdf
Файл устарел
|
Скачать | 929 КБ | |
|
79560-20: Описание типа
2025-79560-20-2.pdf
|
Скачать | 597 КБ | |
|
79560-20: Описание типа
2025-79560-20-3.pdf
|
Скачать | 790.5 КБ | |
|
79560-20: Методика поверки
2020-mp79560-20-2.pdf
|
Скачать | 929 КБ | |
|
79560-20: Методика поверки
МП 651-25-052
2026-mp79560-20.pdf
|
Скачать | 4.7 MБ |
Описание типа
Назначение
Системы измерительные многоцелевые «Пульсар» (далее - системы, СИМ «Пульсар») предназначены для измерений скорости движения приближающихся и удаляющихся транспортных средств (далее - ТС), а также для измерений текущего времени, синхронизированного с национальной шкалой времени UTC(SU), измерений интервалов времени, измерений текущих навигационных параметров и определения на их основе координат систем.
Описание
Принцип действия систем при измерении значений текущего времени, интервалов времени и координат основан на параллельном приеме и обработке сигналов навигационных космических аппаратов космических навигационных систем ГЛОНАСС/GPS с помощью приемника, входящего в состав систем, автоматической синхронизации шкалы времени системы с национальной шкалой времени UTC(SU) и записи текущего момента времени и координат в сохраняемые фото- и видеокадры, формируемые системами.
Принцип действия систем при измерении скорости ТС радиолокационным методом основан на измерении разности частоты высокочастотных сигналов при отражении от ТС (эффект Доплера).
Принцип действия систем при измерении скорости движения ТС по видеокадрам в зоне контроля основан на измерении расстояния, пройденного ТС в зоне контроля за известный интервал времени.
Принцип действия систем при измерении скорости на контролируемом участке основан на измерении расстояния, пройденного ТС, и интервала времени, за которое это расстояние пройдено.
Все измерения проводятся в автоматическом режиме.
Системы измерительные многоцелевые «Пульсар» предназначены для автоматической регистрации нарушений правил дорожного движения С0-С16, в соответствии с ГОСТ Р 57144-2016 «Специальные технические средства, работающие в автоматическом режиме и имеющие функции фото- и киносъемки, видеозаписи, для обеспечения контроля за дорожным движением. Общие технические требования».
Системы работают круглосуточно в автоматическом режиме с целью обнаружения и фиксации следующих событий: превышения установленной'скорости движения транспортного средства, нарушения скоростного режима на протяженном участке дороги, проезд на запрещающий сигнал светофора, выезд на запрещающий сигнал светофора на полосу реверсивного движения, движение по разделительной полосе, невыполнение требования об остановке перед стоп-линией, нарушение правил проезда через железнодорожные переезды, выезда на перекресток или пересечение проезжей' части дороги в случае образовавшегося затора (или нарушение правил пересечения перекрестков с «вафельной» разметкой), движение по велосипедным или пешеходным дорожкам либо тротуарам, выезд на полосу, предназначенную для встречного движения, либо на трамвайные пути встречного направления, движение во встречном направлении по дороге с односторонним движением, движение по полосе, предназначенной для маршрутных ТС, непредоставление преимущества пешеходам, непредоставление преимущества велосипедисту, остановка или стоянка ТС на пешеходном переходе, нарушение правил остановки или стоянки ТС на проезжей части, где парковка запрещена дорожными знаками или дорожной разметкой, нарушение правил остановки или стоянки ТС на тротуаре, остановка у мест остановки маршрутных ТС, нарушение правил остановки, повлекшее создание препятствий для движения других ТС, нарушение правил остановки в местах стоянки легковых такси, нарушение правил остановки на полосе для велосипедистов, остановка в тоннеле, остановка на полосе, предназначенной для маршрутных ТС, расположение ТС на парковке запрещенным способом, остановка на автомагистрали, несоблюдение ограничения минимальной дистанции, размещение ТС на газонах, на территории парков, садов, скверов, бульваров, детских и спортивных площадок, нарушение правил стоянки, пересечение сплошной линии разметки, проезд ТС под запрещающий знак, непредоставление преимущества в движении маршрутному транспортному средству, нарушение правил маневрирования, несоблюдение требований, предписанных дорожными знаками или разметкой проезжей части дороги, поворот налево или разворот в нарушение требований, предписанных дорожными знаками или разметкой проезжей части дороги, нарушение правил расположения транспортного средства на проезжей части дороги, встречного разъезда, а равно движение по обочинам или пересечение организованной транспортной или пешей колонны либо занятие места в ней, несоблюдения требований (предписанных дорожными знаками) запрещающими движение грузовых автотранспортных средств, нарушение правил стоянки ближе 50 м по обе стороны от железнодорожных переездов, невыполнение правил дорожного движения перед поворотом направо, налево или разворотом заблаговременно занять соответствующее крайнее положение на проезжей части, предназначенной для движения в данном направлении, нарушение правил пользования телефоном водителем транспортного средства, нарушение правил пользования внешними световыми приборами, движения автомобиля с разрешённой" массой" ТС по полосам в нарушение ПДД, движение грузового транспорта далее второй полосы, управление транспортным средством водителем, не пристегнутым ремнем безопасности, перевозка пассажиров, не пристегнутых ремнями безопасности, нарушения требований об обязательном прохождении технического осмотра или обязательном страховании гражданской" ответственности владельцев транспортных средств, установка на ТС без соответствующего разрешения спецсигналов (или опознавательного фонаря такси, опознавательного знака «Инвалид» и т.п.), несоблюдения дистанции к впереди движущемуся транспортному средству, мониторинг транспортного потока, поиск ТС находящегося в базах розыска в режиме реального времени, нарушение ограничения экологического класса ТС, нарушение правил использования мотошлемов.
Перечень компонентов систем, их состав и краткое описание функций представлен в таблице 1.
Таблица 1 - Перечень компонентов систем
|
Изображение |
Состав и краткое описание функций | ||
|
Вычислительный контролер малый |
Предназначен для измерений скорости движения ТС, для измерений текущего времени и определения координат систем, а также для питания оконечных компонентов систем. Состоит из вычислительного блока, климатического контроллера, модуля навигации и времени, модуля связи и преобразователя напряжения. К контроллеру возможно подключение до 8 видеокамер (4 распознающих и/или распознающих поворотных и 4 обзорных) | ||
|
Вычислительный контроллер |
Предназначен для измерений скорости движения ТС, для измерений текущего времени и определения координат систем, а также для питания оконечных компонентов систем. Состоит из вычислительного блока, климатического контроллера, модуля навигации и времени, модуля связи и преобразователя напряжения. К контроллеру возможно подключение до 16 видеокамер (8 распознающих и/или распознающих поворотных и 8 обзорных). | ||
|
Фотор: |
^ИГ дарный вычислител блок |
ьный |
Предназначен для измерений скорости движения ТС в зоне контроля и на контролируемом участке радиолокационным методом и по видеокадрам, а также для измерений текущего времени, определения координат систем и фиксации государственных регистрационных знаков (ГРЗ) ТС. Состоит из радарного модуля, видеокамеры, вычислительного блока, климатического контроллера, модуля навигации и времени, встроенного и/или внешнего ИК-прожектора, модуля связи. Может работать как самостоятельно, так и взаимодействовать с вычислительными контроллерами, и/или фоторадарными вычислительными блоками, и/или фото вычислительными блоками Фоторадарный вычислительный блок предназначен для работы как в непрерывном режиме при стационарном размещении на опорах, стойках и других элементах обустройства автомобильных дорог, так и в непрерывном режиме в течение ограниченного промежутка времени при передвижном размещении на специальных конструкциях (штативах, треногах и т.п., вышках на базе ТС). |
|
Изображение |
Состав и краткое описание функций | ||
|
Предназначен для измерений скорости движения ТС в зоне контроля и на контролируемом участке по видеокадрам, а также для измерений текущего времени, определения координат систем и фиксации ГРЗ ТС. Состоит из видеокамеры, вычислительного блока, климатического контроллера, модуля навигации и времени, встроенного и/или внешнего ИК-прожектора, модуля связи. Может работать как самостоятельно, так и взаимодействовать с вычислительными контроллерами, и/или фоторадарными вычислительными блоками, и/или фото вычислительными блоками Фото вычислительный блок предназначен для работы как в непрерывном режиме при стационарном размещении на опорах, стойках и других элементах обустройства автомобильных дорог. | |||
|
IL ° | |||
|
- L"x . ---m- Фото вычислительный блок | |||
|
Видеокамера распознающая |
Предназначена (совместно с вычислительными контроллерами, и/или фоторадарными вычислительными блоками и/или фото вычислительными блоками) для измерений скорости движения ТС, а также для фиксации ГРЗ ТС. Устанавливаются совместно с ИК-прожекторами. | ||
|
Тип 1 G .. Тип 2 • ® Тип 3 Видеокамеры обзорные |
Предназначены для фото-видео съемки дорожной ситуации для обеспечения полной доказательной базы факта нарушения. Не предназначены для измерений. Работают совместно с любым из вычислительных контроллеров, а также с фоторадарным или фото вычислительным блоками. | ||
|
Изображение |
Состав и краткое описание функций |
|
м Видеокамера распознающая поворотная |
Предназначены для фото-видео съемки дорожной ситуации для обеспечения полной доказательной базы факта нарушения. Видеокамера распознающая поворотная имеет возможность вращения по горизонтали на 360°. Предназначена для обеспечения контроля дорожной ситуации и фото-видео фиксации ТС. Работают совместно с любым из вычислительных контроллеров, а также с фоторадарным или фото вычислительным блоками. |
|
1 Непрерывного действия Г" Т (ШЕИ 1® • 1 - л <<■(• од* 1 :• -1 я i|^pi' - 11 Импульсные ИК-прожекторы |
Обеспечивают работу систем в любое время суток без дополнительного освещения. Имеется два типа ИК-прожекторов: импульсный и непрерывного действия. Работают совместно с распознающими камерами, а также с фоторадарным или фото вычислительным блоками. |
|
Коммутационный блок |
Предназначен для питания фото-блоков и оконечных компонентов систем, а также для связи между несколькими компонентами систем. |
Способы установки систем указаны в Руководстве по эксплуатации.
В зависимости от решаемых задач, из компонентов формируются фитералы, представляющий собой законченный комплект, работающий автономно в автоматическом режиме. В состав фитералов могут входить различные комбинации компонентов систем, при этом обязательно наличие как минимум одного вычислительного контроллера или одного вычислительного блока.
Заводской номер наносится на титульный лист паспорта методом компьютерной графики и на корпус систем с помощью шильда, выполненного методом лазерной гравировки. Формат нанесения заводского номера буквенно-цифровой. Знак поверки на системы не наносится.
Корпуса составных компонентов систем защищены от несанкционированного доступа пломбами. Корпуса вычислительных контроллеров и вычислительных блоков могут изготавливаться следующих цветов: белый, серый, серебристый, черный, коричневый и их оттенки.
Системы соответствуют требованиям Технического регламента Таможенного союза «О безопасности низковольтного оборудования» (ТР ТС 004/2011) и Технического регламента Таможенного союза «Электромагнитная совместимость технических средств» (ТР ТС 020/2011).
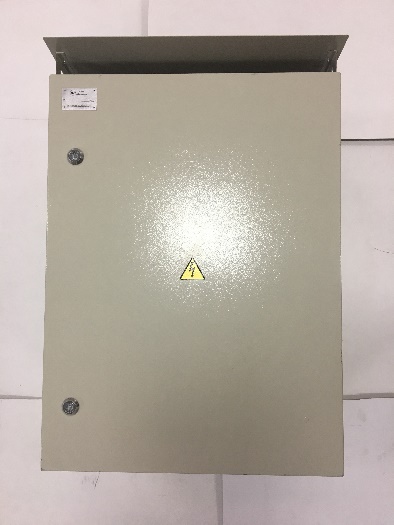
Схема пломбировки от несанкционированного доступа, места нанесения знака утверждения типа и заводского номера представлена на рисунке 1.
Места нанесения знака утверждения типа
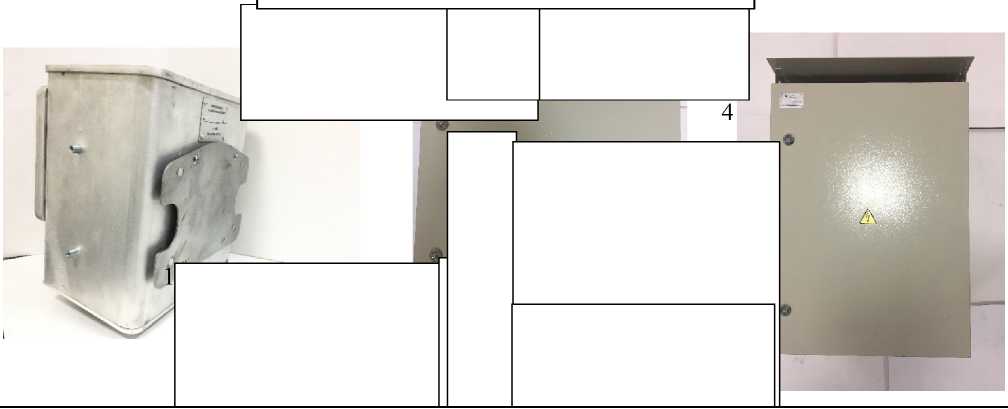
Места пломбировки от несанкционированного доступа:
1- место нанесения мастичной пломбы
2, 3, 4, 5 - места нанесения пломбы-наклейки

Рисунок 1 - Схема пломбировки от несанкционированного доступа, места нанесения знака утверждения типа и заводского номера
Пример маркировки систем представлен на рисунке 2.
Место нанесения
Место нанесения
заводского номера
знака утверждения типа

Рисунок 2 - Пример маркировки систем
Программное обеспечение
Метрологически значимая часть программного обеспечения (ПО) представляет собой отдельный программный модуль. Защита от изменения метрологически значимой части ПО реализована путем установки электронных ключей.
Влияние ПО на метрологические характеристики учтено при нормировании метрологических характеристик. Уровень защиты ПО «высокий» в соответствии с Р 50.2.077-2014.
Таблица 2 - Идентификационные данные метрологически значимой части ПО
|
Идентификационные данные (признаки) |
Значение |
|
Идентификационное наименование ПО |
Pulsar |
|
Номер версии (идентификационный номер) ПО |
не ниже 1.2.8 |
|
Цифровой идентификатор ПО (контрольная сумма исполняемого кода) |
- |
Технические характеристики
Таблица 3 - Метрологические характеристики
|
Наименование характеристики |
Значение |
|
Диапазон измерений скорости движения ТС в зоне контроля и на контролируемом участке, км/ч |
от 0 до 350 |
|
Пределы допускаемой абсолютной погрешности измерений скорости движения ТС в зоне контроля и на контролируемом участке, км/ч |
±1 |
|
Диапазон измерений интервалов времени, c |
от 1 до 86400 |
|
Пределы допускаемой абсолютной погрешности измерений интервалов времени, с |
±1 |
|
Пределы допускаемой абсолютной погрешности синхронизации внутренней шкалы времени систем с национальной шкалой времени UTC(SU), мкс |
±10 |
|
Границы допускаемой абсолютной инструментальной погрешности (при доверительной вероятности 0,95 и геометрическом факторе PDOP < 3) определения координат систем в плане, м * |
±3 |
Таблица 4 - Технические характеристики
|
Наименование характеристики |
Значение |
|
Несущая частота радиолокационного модуля, ГГ ц |
24,15±0,10 |
|
Минимальное расстояние при измерении скорости движения ТС на | |
|
контролируемом участке между двумя фитералами систем, м |
100 |
|
Напряжение электропитания системы от сети переменного тока, В |
от 160 до 280 |
|
Напряжение питания от источника постоянного тока, В |
от 7 до 30 |
|
Рабочий диапазон температур, °С |
от -55 до +60 |
|
Габаритные размеры компонентов, мм, не более: | |
|
- Вычислительный контроллер | |
|
- длина |
794 |
|
- ширина |
572 |
|
- высота |
269 |
|
- Вычислительный контроллер малый | |
|
- длина |
400 |
|
- ширина |
300 |
|
- высота |
210 |
|
- Фоторадарный вычислительный блок | |
|
- длина |
213 |
|
- ширина |
232 |
|
- высота |
154 |
|
- Фото вычислительный блок | |
|
- длина |
213 |
|
- ширина |
232 |
|
- высота |
154 |
|
- Коммутационный блок | |
|
- длина |
600 |
|
- ширина |
600 |
|
- высота |
269 |
|
- Видеокамера распознающая | |
|
- длина |
407 |
|
- ширина |
110 |
|
- высота |
171 |
|
- Видеокамера распознающая поворотная | |
|
- длина |
210 |
|
- ширина |
337 |
|
- Видеокамера обзорная (Тип 1, Тип 2, Тип 3) | |
|
- длина |
98 |
|
- ширина |
88 |
|
- высота |
342 |
|
- ИК-прожектор непрерывного действия | |
|
- длина |
172 |
|
- ширина |
265 |
|
- высота |
61 |
|
- ИК-прожектор импульсный (всех типов) | |
|
- длина |
253 |
|
- ширина |
124 |
|
- высота |
73 |
|
Наименование характеристики |
Значение |
|
Масса компонентов, кг, не более: | |
|
- Вычислительный контроллер |
32,0 |
|
- Вычислительный контроллер малый |
14,0 |
|
- Фоторадарный вычислительный блок |
4,5 |
|
- Фото вычислительный блок |
4,0 |
|
- Коммутационный блок |
25,0 |
|
- Видеокамера распознающая |
3,4 |
|
- Видеокамера распознающая поворотная |
5,8 |
|
- Видеокамера обзорная (Тип 1, Тип 2, Тип 3) |
1,7 |
|
- ИК-прожектор непрерывного действия |
4,6 |
|
- ИК-прожектор импульсный (всех типов) |
3,1 |
Знак утверждения типа
наносится на титульный лист паспорта и руководства по эксплуатации методом компьютерной графики и на корпус систем с помощью шильда, выполненного методом лазерной гравировки.
Комплектность
Таблица 5 - Комплектность систем
|
Наименование |
Обозначение |
Количество |
|
Системы измерительные многоцелевые |
«Пульсар» |
1 к-т* |
|
Документы, поставляемые ООО «СофИТ» | ||
|
Паспорт |
26.51.66-008-28047664-2020 ПС |
1 экз. |
|
Руководство по эксплуатации |
26.51.66-007-28047664-2020 РЭ |
1 экз. |
|
Методика поверки |
1 экз. | |
|
Документы, поставляемые ООО «Форт Крафт» | ||
|
Паспорт |
- |
1 экз. |
|
Руководство по эксплуатации |
- |
1 экз. |
|
Методика поверки |
1 экз. | |
|
*- состав системы определяется заказом. | ||
Сведения о методах измерений
- разделе 1.1 «Описание и работы системы» документа 26.51.66-007-28047664-2020 РЭ «Системы измерительные многоцелевые «Пульсар». Руководство по эксплуатации» (ООО «СофИТ»);
- разделе 1.1 «Описание и работы системы» документа «Системы измерительные многоцелевые «Пульсар». Руководство по эксплуатации» (ООО «Форт Крафт»).
Нормативные документы
Постановление Правительства РФ от 16.11.2020 № 1847 «Об утверждении перечня измерений, относящихся к сфере государственного регулирования обеспечения единства измерений» в части пп. 12.1.1, 12.1.2, 12.1.3, 12.42.1, 12.42.2, 12.43
ГОСТ Р 57144-2016 «Специальные технические средства, работающие в автоматическом режиме и имеющие функции фото- и киносъемки, видеозаписи, для обеспечения контроля за дорожным движением. Общие технические требования» в части пп. 5.3, 5.4, 5.5
Системы измерительные многоцелевые «Пульсар». Технические условия 26.51.66-006-28047664-2020 ТУ