



Системы программно-аппаратные управляющие ПАУК
| Номер в ГРСИ РФ: | 90699-23 |
|---|---|
| Производитель / заявитель: | ООО "САЙБЕРРИ", г. Москва |
Системы программно-аппаратные управляющие ПАУК (далее - системы) предназначены для измерений в автоматическом режиме скорости движения транспортных средств (ТС) радиолокационным и безрадарным методом (по видеокадрам) в зоне контроля и на контролируемом участке, а также для измерений текущих навигационных параметров по сигналам навигационных космических аппаратов глобальных навигационных спутниковых систем (ГНСС) GPS/ГЛОНАСС и других ГНСС, определения на их основе координат местоположения систем в плане и синхронизации внутренней шкалы времени систем с национальной шкалой координированного времени UTC(SU).
Информация по Госреестру
| Основные данные | |
|---|---|
| Номер по Госреестру | 90699-23 |
| Действует | по 08.12.2028 |
| Наименование | Системы программно-аппаратные управляющие |
| Модель | ПАУК |
| Характер производства | Серийное |
| Идентификатор записи ФИФ ОЕИ | 87c313e8-56c1-9a32-50fd-fb28a875da94 |
Производитель / Заявитель
Общество с ограниченной ответственностью "САЙБЕРРИ" (ООО "САЙБЕРРИ"), г. Москва.
Поверка
| Межповерочный интервал / Периодичность поверки |
2 года
|
| Зарегистрировано поверок | |
| Найдено поверителей | |
| Успешных поверок (СИ пригодно) | 793 (100%) |
| Неуспешных поверок (СИ непригодно) | 0 (0 %) |
| Актуальность информации | 24.07.2026 |
Поверители
Скачать
|
90699-23: Описание типа
2025-90699-23.pdf
|
Скачать | 216 КБ | |
|
90699-23: Методика поверки
2023-mp90699-23.pdf
|
Скачать | 4.9 MБ |
Описание типа
Назначение
Системы программно-аппаратные управляющие ПАУК (далее - системы) предназначены для измерений в автоматическом режиме скорости движения транспортных средств (ТС) радиолокационным и безрадарным методом (по видеокадрам) в зоне контроля и на контролируемом участке, а также для измерений текущих навигационных параметров по сигналам навигационных космических аппаратов глобальных навигационных спутниковых систем (ГНСС) GPS/ГЛОНАСС и других ГНСС, определения на их основе координат местоположения систем в плане и синхронизации внутренней шкалы времени систем с национальной шкалой координированного времени UTC(SU).
Описание
Принцип действия систем при измерении скорости движения ТС по видеокадрам основан на измерении расстояния, пройденного ТС в зоне контроля и интервала времени, за который оно было пройдено.
Принцип действия систем при измерении скорости движения ТС радиолокационным методом (в случае, если система дооснащена блоком радиолокационным), основан на измерении разности частоты высокочастотных сигналов при отражении от движущегося ТС, находящегося в зоне контроля (эффект Доплера).
Принцип действия систем при измерении скорости движения на контролируемом участке основан на измерении интервала времени, за которое ТС прошло расстояние между зонами контроля двух блоков измерительных (далее - БИ). Для ТС, ГРЗ которого был распознан БИ на въезде на контролируемый участок и БИ на выезде из него, измеряется эффективное пройденное ТС расстояние, зависящее от координат обоих БИ и от расположения ТС в зонах контроля в момент распознавания ГРЗ ТС (которое может определяться как оптическим, так радарным методом). На основании этих данных рассчитывается средняя скорость движения ТС на контролируемом участке. Функция измерения скорости на контролируемом участке может быть реализована при стационарной установке двух связанных друг с другом БИ. Для измерений скорости движения ТС на контролируемом участке необходимо не менее двух БИ.
Принцип действия систем при измерении значений текущего времени и определении координат местоположения в плане основан на приеме и обработке сигналов ГНСС GPS/ГЛОНАСС и других ГНСС с помощью приемника, входящего в состав систем, автоматической синхронизации шкалы времени систем с национальной шкалой координированного времени UTC(SU) и записи текущего момента времени и координат местоположения систем в плане в сохраняемые фото- и видеокадры, формируемые системами.
Системы предназначены для работы в стационарном режиме. Блоки систем размещаются на опорах, и других элементах обустройства автомобильных дорог.
Конструктивно системы состоят из одного или более БИ, одного или более блока коммутационного (далее - БК), могут содержать один или более блок радиолокационный (далее - БР).
Конкретный состав систем определяется на этапе проектирования. В состав систем может входить следующее дополнительное оборудование: обзорные видеокамеры, ИК-прожекторы, блоки питания, комплекты кабелей, антенны, модули связи, устройства мониторинга автономных источников питания и других систем, устройства интеграции с дорожными контроллерами.
БИ обеспечивает измерение скорости движения ТС в зоне контроля радиолокационным методом (в случае, если система дооснащена БР) и/или по видеокадрам, измерение скорости движения ТС на контролируемом участке дороги, измерение значений текущего времени, синхронизированного с национальной шкалой координированного времени UTC(SU). БИ включает в себя промышленный компьютер и программное обеспечение «Spider». В БИ устанавливается приемник сигналов ГНСС для определения координат местоположения систем в плане.
БК представляет собой внешний по отношению к БИ блок. БК собирает, агрегирует и, при необходимости, преобразовывает и обрабатывает данные со всех блоков систем и осуществляет взаимодействие с внешними системами. БК может комплектоваться промышленным компьютером и блоком передачи данных. Корпус БК изготавливается из пластика и/или металла и может быть окрашен в различные цвета по заказу.
Функционально системы применяется для распознавания ТС и его признаков, распознавания ГРЗ ТС, фиксации нарушений ПДД и нарушений в сфере благоустройства, связанных с размещением ТС, в соответствии с Главой 12 КоАП РФ, определенных в разделе 3.4 РУБС.411739.006 ТУ в том числе, но не ограничиваясь (знак * означает, что данный функционал реализуется при подключении соответствующей базы данных):
- факта проезда ТС без совершения нарушения;
- определения типа (категории) ТС;
- превышения установленной скорости движения ТС;
- превышения установленной скорости на контролируемом участке дороги;
- выезда на железнодорожный переезд при закрытом или закрывающемся шлагбауме либо при запрещающем сигнале светофора;
- выезда на встречную полосу на железнодорожном переезде;
- несоблюдения требований, предписанных дорожными знаками, запрещающими движение грузовых автотранспортных средств;
- пересечения в нарушение ПДД линий разметки проезжей части дороги;
- проезда на запрещающий сигнал светофора;
- невыполнения требования об остановке перед стоп-линией;
- невыполнения требования об остановке перед знаком «Стоп»;
- выезда на перекресток или пересечение проезжей части дороги, в случае образовавшегося затора (или нарушение правил пересечения перекрестков с «вафельной» разметкой);
- поворота или движения прямо, или разворота в нарушение требований, предписанных дорожными знаками или разметкой проезжей части дороги;
- невыполнения требования перед поворотом направо, налево или разворотом заблаговременно занять соответствующее крайнее положение на проезжей части, предназначенной для движения в данном направлении;
- поворот налево или разворот в нарушение требований, предписанных дорожными знаками или разметкой проезжей части дороги;
- разворот на пешеходном переходе;
- движение во встречном направлении по дороге с односторонним движением;
- движение транспортных средств по полосе для маршрутных транспортных средств в нарушение ПДД*;
- нарушение установленных правил стоянки или остановки транспортных средств;
- несоблюдение требований, предписанных дорожными знаками или разметкой проезжей части дороги, запрещающими остановку или стоянку транспортных средств;
- остановки транспортных средств на полосе для маршрутных транспортных средств в нарушение ПДД*;
- остановки или стоянки на местах, отведенных для ТС инвалидов*;
- остановки или стоянки транспортных средств на трамвайных путях либо остановки транспортных средств далее первого ряда от края проезжей части;
- остановки на автомагистралях, эстакадах, мостах, путепроводах, в тоннелях;
- нарушения требований об обязательном страховании гражданской ответственности владельцев транспортных средств*;
- факта управления ТС, не зарегистрированным в установленном порядке*;
- нарушения правил, предписаний или требований, введенных в период режима повышенной готовности, чрезвычайной ситуации, карантина или при возникновении угрозы распространения заболевания, представляющего опасность для окружающих, совершенных с использованием транспортного средства*;
- несоблюдения требований, предписанных дорожными знаками или разметкой проезжей части дороги;
- выезда в нарушение ПДД на полосу, предназначенную для встречного движения или на трамвайные пути встречного направления;
- проезда под запрещающий знак;
- движения задним ходом по автомагистрали;
- движения на грузовом автомобиле с разрешенной максимальной массой более 3,5 тонн по автомагистрали далее второй полосы;
- движения по автомагистрали на ТС, скорость которого по технической характеристике или по его состоянию менее 40 километров в час, а равно остановка ТС на автомагистрали вне специальных площадок для стоянки;
- разворота или въезда ТС в технологические разрывы разделительной полосы на автомагистрали;
- разворот или движение задним ходом в местах, где такие маневры запрещены;
- движения по велосипедным или пешеходным дорожкам либо тротуарам;
- движения по обочинам (газонам, полосам для реверсивного движения, трамвайным путям);
- нарушения в сфере благоустройства, связанные с размещением ТС (в том числе, на платных городских парковках);
- нарушения правил пользования внешними световыми приборами;
- нарушения правил применения ремней безопасности или мотошлемов;
- нарушения правил пользования телефоном водителем транспортного средства;
- нарушения требований об обязательном наличии оформленной в установленном порядке диагностической карты, подтверждающей допуск транспортного средства к участию в дорожном движении*;
- установки на ТС без соответствующего разрешения спецсигналов*;
- невыполнения требования ПДД уступить дорогу пешеходам (велосипедистам или иным участникам дорожного движения);
- непредоставление преимущества пешеходам на посадочной площадке;
- нарушения правил, установленных для движения транспортных средств в жилых
зонах;
- прочих нарушений ПДД приближающихся и удаляющихся ТС, двигающихся в плотном потоке во всей зоне контроля с формированием пакета данных и траектории движения (трекинг) по каждому ТС с внесением координат установки комплексов и времени фиксации ТС;
- неисполнения обязанности по внесению платы за проезд ТС по платным автомобильным дорогам, платным участкам автомобильных дорог*.
Алгоритм выявления и фиксации нарушений основан на перечисленных выше принципах действия и реализован за счет автоматического совмещения результатов измерений, распознанного ГРЗ ТС, фото- и видеоматериалов, а также, при необходимости, размеченных зон фиксации и месторасположения ТС на дорожном полотне, данных нейросетевой видеоаналитики, информации, полученной по запросам к внешним базам данных.
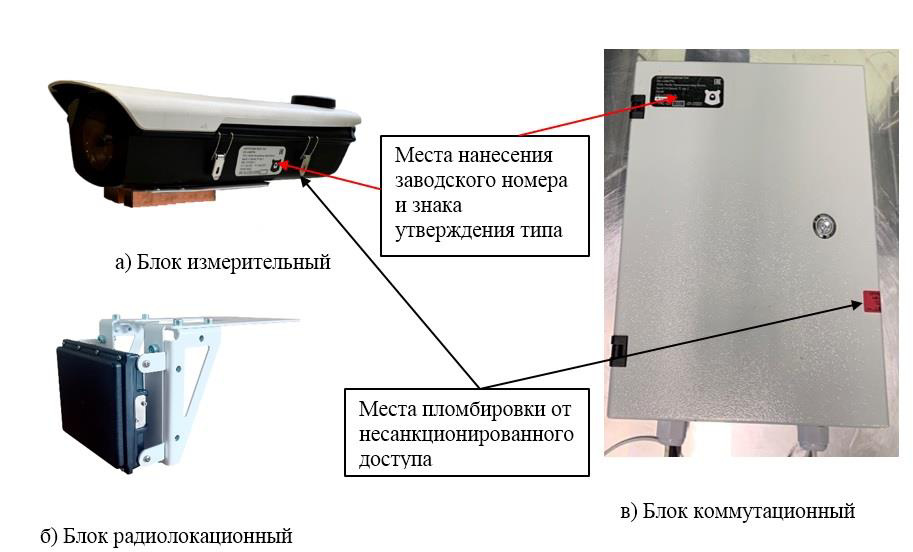
Корпуса БИ и БК систем защищены от несанкционированного доступа пломбами.
Общий вид составных частей систем, места нанесения заводского номера, знака утверждения типа и пломбировки представлены на рисунке 1.
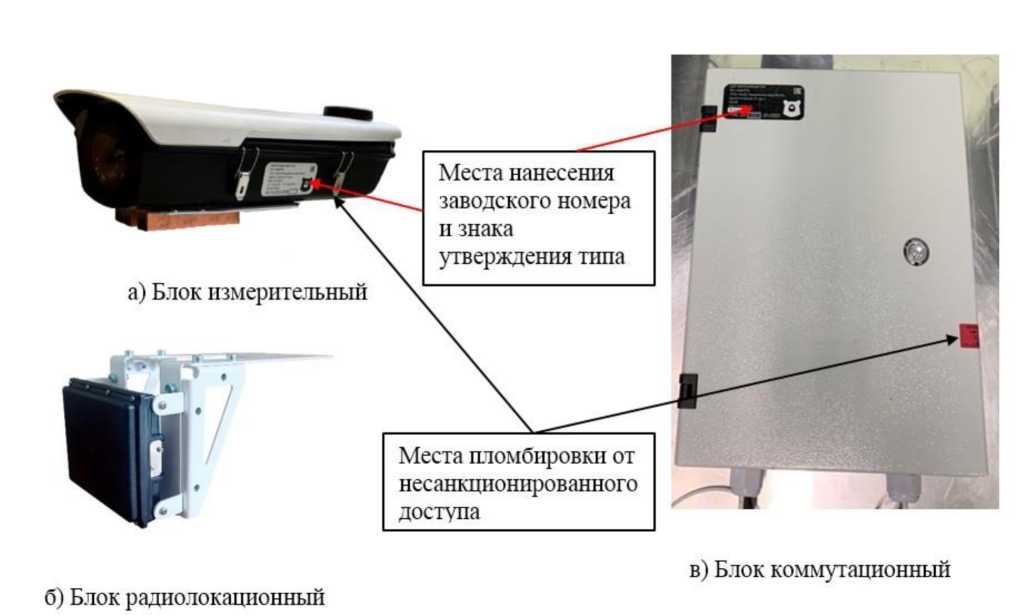
6) Блок радиолокационный (БР)
Рисунок 1 - Общий вид составных частей систем, места нанесения заводского номера, знака утверждения типа и пломбировки
Заводской номер наносится методом печати на этикетку, расположенную на корпусе БИ и БК систем. Формат нанесения заводского номера буквенно-числовой.
Знак поверки на системы не наносится.
Программное обеспечение
Функционирование систем осуществляется под управлением программного обеспечения (далее - ПО) «Spider». Влияние ПО на метрологические характеристики учтено при нормировании метрологических характеристик.
Конструкция средств измерений исключает возможность несанкционированного влияния на программное обеспечение и измерительную информацию. Уровень защиты ПО «высокий» в соответствии с Р 50.2.077-2014.
Идентификационные данные ПО указаны в таблице 1.
Таблица 1 - Идентификационные данные программного обеспечения
|
Идентификационные данные (признаки) |
Значение |
|
Идентификационное наименование ПО |
Spider |
|
Номер версии (идентификационный номер) ПО |
1.0 |
|
Цифровой идентификатор ПО (контрольная сумма) |
8cbd205f457fa11e81526b43ab2c0f52 |
Технические характеристики
Метрологические и технические характеристики систем приведены в таблицах 2 и 3.
Таблица 2 - Метрологические характеристики
|
Наименование характеристики |
Значение | |
|
Диапазон измерений скорости движения ТС, км/ч: - при измерении в зоне контроля радиолокационным методом1) - при измерении в зоне контроля по видеокадрам - при измерении на контролируемом участке дороги |
от 1 до 350 от 0 до 350 от 0 до 350 | |
|
Пределы допускаемой абсолютной погрешности измерений движения ТС, км/ч: - при измерении в зоне контроля радиолокационным методом1) - при измерении в зоне контроля по видеокадрам - при измерении на контролируемом участке дороги |
скорости |
±1 ±1 ±1 |
|
Пределы допускаемой абсолютной погрешности синхронизации внутренней шкалы времени систем с национальной шкалой координированного времени UTC(SU), мкс |
±3 | |
|
Доверительные границы абсолютной погрешности определения координат местоположения систем в плане (при доверительной вероятности 0,95 и геометрическом факторе PDOP не более 3), м:2) - в автономном режиме - в режиме «Кинематика в реальном времени (RTK)»3) |
±3 ±1,5 | |
|
1) если система дооснащена блоком радиолокационным; 2) метрологическая характеристика определена по сигналам от спутников GPS и ГЛОНАСС, принимаемых одновременно; 3) режим обеспечивается при: - работе по сигналам L1OF, L2OF ГЛОНАСС; L1C/A, L2C, L5I+Q GPS; E1B+C Galileo; B1I, B2I BeiDou одновременно; - использовании дифференциальных поправок формата RTCM версии 3.2 от поверенной базовой станции, расположенной на удалении не более 70 км | ||
Таблица 3 - Технические характеристики
|
Наименование характеристики |
Значение |
|
1 |
2 |
|
Минимальное расстояние контролируемого участка дороги, м |
80 |
|
При измерении скорости в зоне контроля, размеры зоны контроля, м, не менее: - длина - ширина |
50 20 |
Продолжение таблицы 3
|
1 |
2 |
|
Габаритные размеры составных частей систем, мм, не более: БИ | |
|
- длина |
510 |
|
- ширина |
175 |
|
- высота |
245 |
|
БК | |
|
- длина |
300 |
|
- ширина |
500 |
|
- высота |
700 |
|
Условия эксплуатации: - температура окружающего воздуха, °С |
от -60 до +65 |
|
- атмосферное давление, кПа |
от 60 до 110 |
|
- относительная влажность окружающего воздуха при температуре 25 °С, %, не более |
98 |
|
Масса составных частей систем, кг, не более: - БИ |
7,5 |
|
- БК |
30 |
|
Потребляемая мощность, В^А, не более: - БИ |
50 |
|
- БК |
300 |
|
Напряжение питания от сети переменного тока частотой (50±1) Гц, В |
от 90 до 264 |
|
Напряжение питания от источника постоянного тока, В |
от 8 до 30 |
Знак утверждения типа
наносится на титульный лист паспорта и руководства по эксплуатации и на этикетку, расположенную на корпусе блока измерительного и блока коммутационного в месте, указанном на рисунке 1, методом печати.
Комплектность
Комплектность систем приведена в таблице 4.
Таблица 4 - Комплектность средства измерений
|
Наименование |
Обозначение |
Количество |
|
Система программно-аппаратная управляющая ПАУК в составе: |
PK |
1 шт. |
|
Блок измерительный (БИ) |
PKM |
по заказу |
|
Блок коммутационный (БК) |
PKC |
по заказу |
|
Блок радиолокационный (БР) |
PKR |
по заказу |
|
Паспорт |
РУБС.411739.006 ПС |
1 экз. |
|
Руководство по эксплуатации |
РУБС.411739.006 РЭ |
1 экз. |
|
Дополнительное оборудование |
- |
по заказу |
Сведения о методах измерений
приведены в разделе 2 «Описание системы» документа РУБС.411739.006 РЭ «Система программно-аппаратная управляющая ПАУК. Руководство по эксплуатации».
Нормативные документы
Постановление Правительства Российской Федерации от 16 ноября 2020 г. № 1847 «Об утверждении перечня измерений, относящихся к сфере государственного регулирования обеспечения единства измерений»;
Приказ Росстандарта от 26 сентября 2022 г. № 2360 «Об утверждении государственной поверочной схемы для средств измерений времени и частоты»;
Приказ Росстандарта от 7 июня 2024 г. № 1374 «Об утверждении Государственной поверочной схемы для координатно-временных средств измерений»;
РУБС.411739.006 ТУ «Система программно-аппаратная управляющая ПАУК. Технические условия».