Стенды лазерного сканирования и дефектоскопии Робоскоп ВТМ-5000



| Номер в ГРСИ РФ: | 70346-18 |
|---|---|
| Категория: | Дефектоскопы |
| Производитель / заявитель: | ООО "НПК "ТЕХНОВОТУМ", г.Москва |
Стенды лазерного сканирования и дефектоскопии Робоскоп ВТМ-5000 (далее по тексту -стенды) предназначены для проведения в автоматическом режиме: лазерного сканирования (обмер геометрических параметров объекта контроля); вихретокового, импедансного, ультразвукового и визуально-измерительного методов неразрушающего контроля с целью определения координат и измерения размеров выявленных дефектов, в деталях и изделиях в процессе производства, эксплуатации и ремонта в различных отраслях где необходимо применение средств автоматизации неразрушающего контроля, таких как: рельсовый транспорт, трубопроводный транспорт, авиационная промышленность, машиностроительная промышленность, газо - нефтехимическая промышленность, атомная промышленность и др.
Информация по Госреестру
| Основные данные | |
|---|---|
| Номер по Госреестру | 70346-18 |
| Действует | по 19.02.2023 |
| Наименование | Стенды лазерного сканирования и дефектоскопии |
| Модель | Робоскоп ВТМ-5000 |
| Код идентификации производства |
ОС
СИ не соответствует критериям подтверждения производства на территории
РФ в соответствии с постановлением №719
|
| Характер производства | Серийное |
| Идентификатор записи ФИФ ОЕИ | 754eb1ce-872d-167c-b663-a3649ea8fac0 |
Производитель / Заявитель
ООО "НПК "ТЕХНОВОТУМ", РОССИЯ, г.Москва
РОССИЯ
Поверка
| Межповерочный интервал / Периодичность поверки |
1 год
|
| Зарегистрировано поверок | |
| Найдено поверителей | |
| Успешных поверок (СИ пригодно) | 13 (100%) |
| Неуспешных поверок (СИ непригодно) | 0 (0 %) |
| Актуальность информации | 14.12.2025 |
Поверители
Скачать
|
70346-18: Описание типа
2021-70346-18.pdf
|
Скачать | 1.2 MБ | |
|
70346-18: Методика поверки
2021-mp70346-18.pdf
|
Скачать | 9.8 MБ |
Описание типа
Назначение
Стенды лазерного сканирования и дефектоскопии Робоскоп ВТМ-5000 (далее по тексту -стенды) предназначены для проведения в автоматическом режиме: лазерного сканирования (обмер геометрических параметров объекта контроля); вихретокового, импедансного, ультразвукового и визуально-измерительного методов неразрушающего контроля с целью определения координат и измерения размеров выявленных дефектов, в деталях и изделиях в процессе производства, эксплуатации и ремонта в различных отраслях где необходимо применение средств автоматизации неразрушающего контроля, таких как: рельсовый транспорт, трубопроводный транспорт, авиационная промышленность, машиностроительная промышленность, газо- нефтехимическая промышленность, атомная промышленность и др.
Описание
Стенд является автоматизированной измерительной системой, в которой реализованы измерительный, ультразвуковой, вихретоковый, импедансный методы контроля, с возможностью перемещения манипулятора с инструментом контроля по заданной траектории в трехмерном пространстве и позиционирования рабочей точки инструмента контроля по указанным координатам в пределах зоны досягаемости манипулятора. По требованию заказчика стенды могут комплектоваться блоком контроля твердости.
Общий вид стенда представлен на рисунке 1.
Обозначение места нанесения знака поверки, места нанесения знака утверждения типа и заводского номера представлены на рисунке 2.

Рисунок 1 - Общий вид стенда лазерного сканирования и дефектоскопии Робоскоп ВТМ-5000 в портальном исполнении

Рисунок 2 - Места нанесения знака поверки, знака утверждения типа и заводского номера
Варианты исполнения стенда представлены на Рисунках 3 -7 (объекты контроля показаны условно). Варианты исполнения определяются заказом.
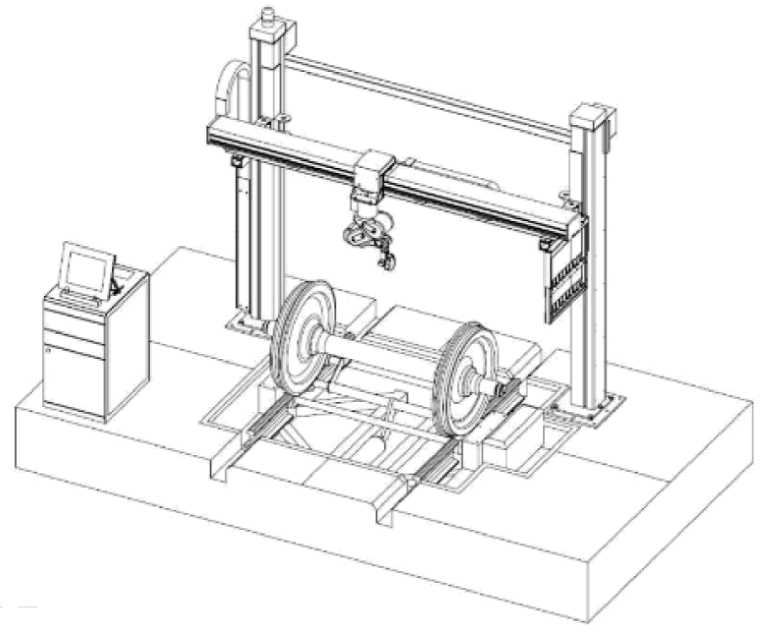
Рисунок 3 - Портальное исполнение стенда лазерного сканирования и дефектоскопии Робоскоп ВТМ-5000. Контроль крупногабаритных тел вращения и/или крупногабаритных объектов
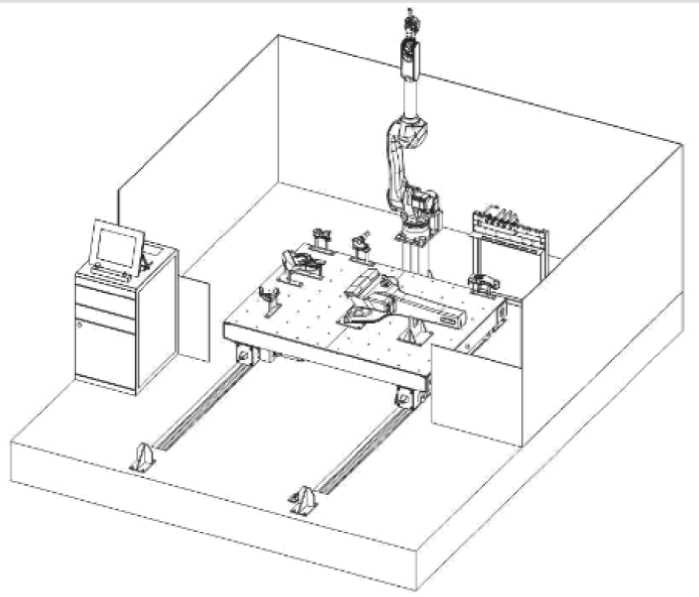
Рисунок 4 - Стационарное исполнение стенда лазерного сканирования и дефектоскопии Робоскоп ВТМ-5000 с тележкой для автоматизированной подачи объекта контроля
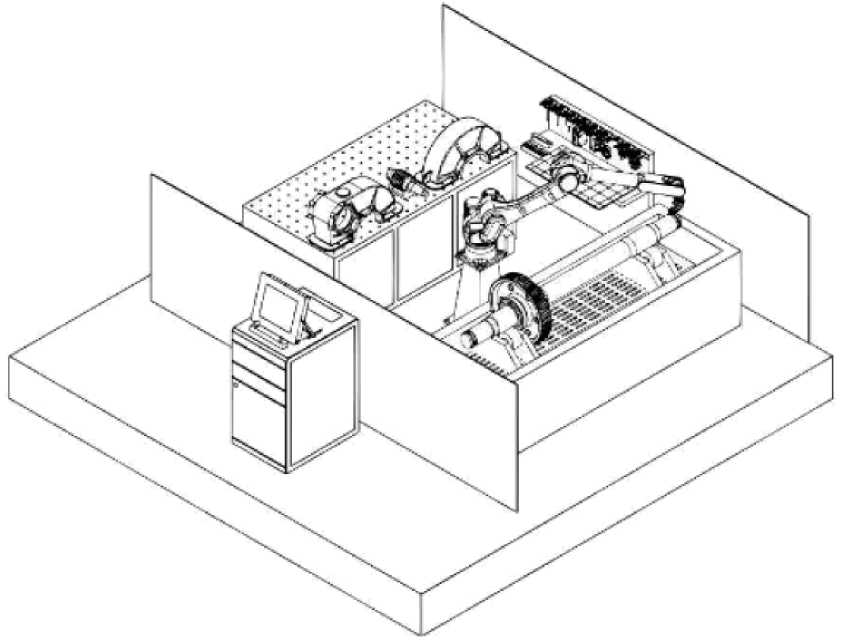
Рисунок 5 - Стационарное исполнение стенда лазерного сканирования и дефектоскопии Робоскоп ВТМ-5000. Контроль среднегабаритных объектов и/или тел вращения
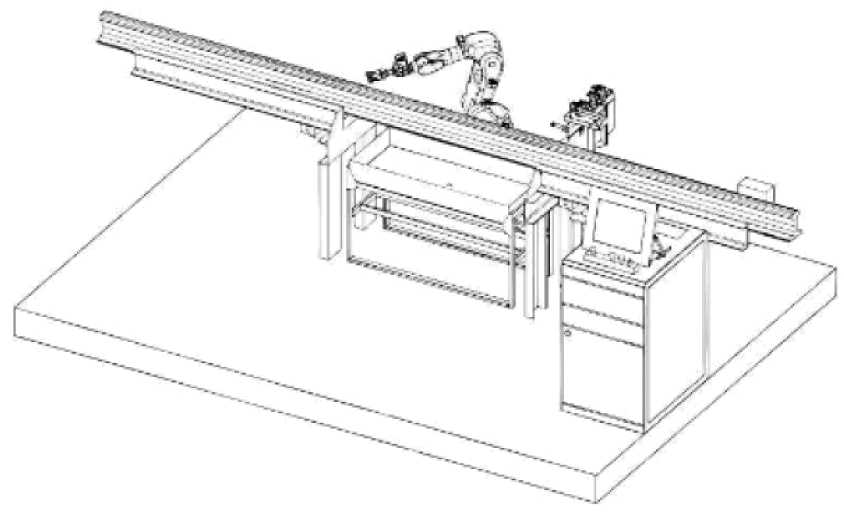
Рисунок 6 - Конвейерное исполнение стенда лазерного сканирования и дефектоскопии Робоскоп ВТМ-5000. Встраивание в поточную систему производства
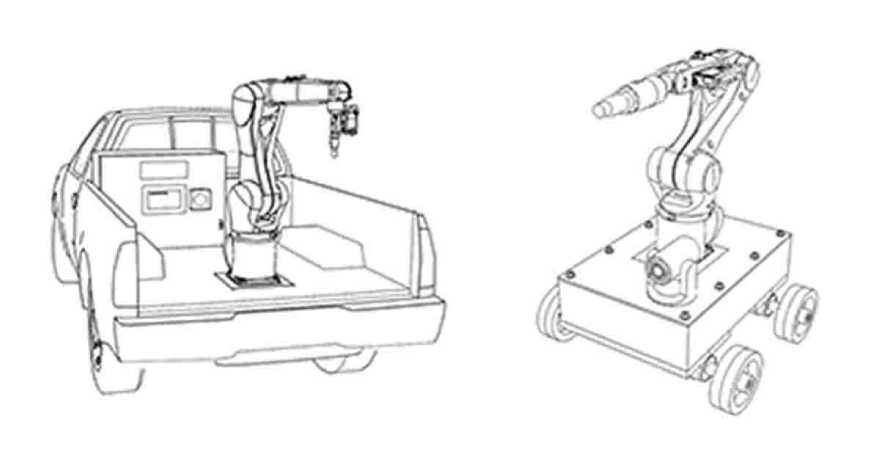
Рисунок 7 - Мобильное исполнение стенда лазерного сканирования и дефектоскопии Робоскоп ВТМ-5000 в передвижной лаборатории или на моторизированной платформе
Принцип действия стенда лазерного сканирования и дефектоскопии Робоскоп ВТМ-5000:
В режиме лазерного сканирования:
Лазерный модуль реализует принцип оптической триангуляции, основанный на регистрации изменения положения отраженного светового пятна от контролируемого объекта на светочувствительной линейке фотоприемника, производит измерения расстояния от текущего положения лазерного модуля до проекции светового пучка на объекте контроля и обеспечивает корректировку заданной траектории перемещения манипулятора с преобразователем.
Лазерный модуль предназначен для бесконтактного сканирования деталей и узлов на предмет определения расстояния от лазерного модуля до текущего положения светового пятна на объекте контроля. Данная информация передается в управляющий компьютер и используется в дальнейших вычислениях для определения различных геометрических параметров изделий. Результаты обработки отображаются на экране и заносятся в энергонезависимую память стенда.
В режиме измерительного контроля:
Модуль измерительного контроля производит измерения видимых размеров дефектов по принципу компьютерной обработки цифрового изображения поверхности объекта в статическом и динамическом режимах захвата изображения.
Модуль измерительного контроля предназначен для бесконтактного измерения линейных размеров дефектов, выходящих на поверхность объекта контроля, находящегося в поле зрения видеокамеры, методом обработки цифрового изображения поверхности объекта контроля в статическом и динамическом режимах захвата изображения.
Цифровые изображения поверхности объекта контроля, получаемые с видеокамеры передаются в управляющий компьютер вместе с координатами полученного изображения и используются в дальнейших вычислениях для определения различных геометрических размеров дефектов. Результаты обработки отображаются на экране и заносятся в энергонезависимую память стенда.
В режиме вихретокового контроля:
Модуль вихретокового контроля основан на регистрации изменений электромагнитного поля вихревых токов, наводимых возбуждающей катушкой в электропроводящем объекте контроля.
Модуль вихретокового контроля предназначен для неразрушающего контроля деталей из немагнитных и ферромагнитных металлов и сплавов, на наличие поверхностных и подповерхностных дефектов типа трещин, расслоений, закатов, раковин, неметаллических включений. Результаты обработки измерений отображаются на экране и заносятся в энергонезависимую память стенда.
В режиме импедансного контроля:
Модуль импедансного контроля основан на регистрации изменений режима генерации механических колебаний в стержне преобразователя, контактирующего с поверхностью объекта контроля при изменении механического импеданса контролируемой зоны.
Модуль импедансного контроля предназначен для неразрушающего контроля конструкций и корпусных деталей из композитных материалов и сотовых структур на наличие дефектов типа непроклей или расслоение. Результаты обработки измерений отображаются на экране и заносятся в энергонезависимую память стенда.
В режиме ультразвукового контроля:
Модуль ультразвукового контроля основан на прохождении, отражении и трансформации ультразвуковых колебаний на неоднородностях, несплошностях материалов (дефектах).
Модуль ультразвукового контроля предназначен для неразрушающего контроля материалов, изделий, сварных соединений на наличие дефектов типа нарушения сплошности, определения координат дефектов, измерения амплитуд эхосигналов от дефектов, измерения времени распространения ультразвуковых колебаний в материалах.
Совокупность данных, собранных о дефекте, обрабатывается встроенным процессором. Результаты обработки отображаются на экране и заносятся в энергонезависимую память стенда.
Стенд накапливает в своем архиве не менее 1000 записей результатов контроля с целью последующего их анализа и представления в виде документа.
Стенд может использоваться со следующими типами преобразователей, изготовленными ООО «НПК «ТЕХНОВОТУМ»:
- Ультразвуковые совмещенные и раздельно-совмещенные, прямые и наклонные пьезоэлектрические преобразователи (ПЭП), преобразователи с фазированными решетками (ФР), электромагнитно-акустические преобразователи.
- Вихретоковые параметрические, трансформаторные и матричные преобразователи.
- Импедансных совмещенные, раздельно-совмещенные, матричные преобразователи.
- Ударные единичные, матричные преобразователи.
Программное обеспечение
Программное обеспечение (ПО) выполняет следующие основные функции:
- управление аппаратными ресурсами;
- хранение всех результатов измерений в единой базе данных;
- отображение результатов измерений в режиме реального времени;
- отображение результатов измерений в виде пересчетных значений по заранее предустановленным параметрам.
Уровень защиты ПО «средний» в соответствии с Р 50.2.077-2014.
Идентификационные признаки ПО стендов соответствуют данным, приведенным в таблице 1.
Таблица 1
|
Идентификационные данные (признаки) |
Значение |
|
Идентификационное наименование ПО |
Робоскоп 5000 |
|
Номер версии (идентификационный номер) ПО |
1.2.0.26 и выше |
|
Цифровой идентификатор ПО |
- |
Технические характеристики
Таблица 2 - Метрологические характеристики
|
Наименование характеристики |
Значение |
|
В режиме лазерного сканирования: | |
|
Диапазон измерений геометрических размеров объекта контроля по трем координатам (X, Y, Z) в режиме лазерного сканирования (минимально и максимально допустимая дальность от лазерного измерителя до объекта измерения), мм - диапазон 1 - диапазон 2 - диапазон 3 |
от 55 до 105 от 100 до 350 от 425 до 1415 |
|
Пределы допускаемой абсолютной погрешности измерений геометрических размеров объекта контроля по трем координатам (X, Y, Z), мм |
±(0,02+0,001-Д) где Д - значение расстояния от лазерного измерителя до сканируемого объекта, мм |
|
В режиме измерительного контроля: | |
|
Диапазон измерений длины (ширины) дефектов, мм |
от 0,1 до 1000,0 |
|
Пределы допускаемой абсолютной погрешности измерений длины (ширины) дефектов, мм - от 0,1 до 9,0 мм включительно - свыше 9,0 до 300,0 мм включительно - свыше 300,0 до 1000,0 мм |
±(0,1+0,01Ъ) ±0,5 ±1,0 где L - значение измеренной длины (ширины) дефектов, мм |
|
В режиме вихретокового контроля: | |
|
Минимальная глубина выявляемых поверхностных дефектов, при значении шероховатости Ra=2,5, мм |
0,2 |
|
Максимальная глубина залегания выявляемых поверхностных дефектов типа «коррозия» в немагнитных электропроводных материалах, мм |
5,0 |
|
Пределы допускаемой абсолютной погрешности измерений глубины залегания выявляемых поверхностных дефектов, мм |
±(0,05+0,1-Н), где Н -измеренная глубина залегания дефекта, мм |
|
Диапазон частот импульсов генератора импульсов возбуждения*, кГц - диапазон 1 - диапазон 2 |
от 1 до 1000 от 2 до 2000 |
|
Пределы допускаемой относительной погрешности установки частоты импульсов генератора импульсов возбуждения, % |
±10 |
|
Номинальное значение амплитуды импульсов возбуждения на эквивалентной нагрузке 100 Ом, В, не менее |
4 |
|
В режиме импедансного контроля: | |
|
Порог чувствительности к определению искусственных дефектов (минимальная площадь выявляемых дефектов типа расслоение при глубине залегания 1,5 мм), мм х мм / (мм2) |
7х 7/(41) |
|
Пределы допускаемой относительной погрешности измерений площади искусственных дефектов, % |
±15 |
|
Диапазон частот импульсов генератора импульсов возбуждения, кГц |
от 1 до 100 |
|
Пределы допускаемой относительной погрешности установки | |
|
Наименование характеристики |
Значение |
|
частоты импульсов генератора импульсов возбуждения, % |
±10 |
|
Номинальное значение амплитуды импульсов возбуждения на эквивалентной нагрузке 100 Ом, В, не менее |
4 |
|
В режиме ультразвукового контроля: | |
|
Диапазон измерений глубины залегания дефекта и/или толщины изделий, мм |
от 2 до 4600 |
|
Пределы допускаемой абсолютной погрешности измерений глубины залегания дефекта и/или толщины изделий, мм |
±(О,3+О,О1-Но), где Но - измеренное значение глубины залегания дефекта и/или толщины изделия, мм |
|
Диапазон измерений расстояния от точки ввода до проекции дефекта на поверхность сканирования, мм |
от 2 до 165 |
|
Пределы допускаемой абсолютной погрешности измерений расстояния от точки ввода до проекции дефекта на поверхность сканирования, мм |
±(0,3+0,01Ъ), где L - измеренное значение расстояния от передней грани преобразователя до проекции дефекта на поверхность сканирования, мм |
|
Номинальные значения амплитуды импульсов возбуждения на нагрузке 50 Ом, В, не менее |
75; 150; 225 |
|
Пределы допускаемой относительной погрешности установки частоты импульсов генератора импульсов возбуждения, % |
±20 |
|
Диапазон частот импульсов генератора импульсов возбуждения*, МГц - диапазон 1 - диапазон 2 |
от 0,2 до 10,0 от 0,2 до 20,0 |
|
* Возможен один из диапазонов в зависимости от комплекта поставки. | |
Таблица 3 - Основные технические характеристики
|
Наименование характеристики |
Значение |
|
Время установления рабочего режима, мин, не более |
15 |
|
Время непрерывной работы, ч, не менее |
24 |
|
Пределы допускаемой абсолютной погрешности определения координат конечной точки манипулятора, мм |
±0,5 |
|
Электрическое питание от сети переменного тока: - напряжение, В - частота, Гц |
380/220 50±1 |
|
Мощность, потребляемая стендом от сети переменного тока, кВт, не более |
6,0 |
|
Габаритные размеры, длина х ширина х высота, (без учета механизмов перемещения), мм, не более |
6000х6000х4000 |
|
Масса стенда (без учета механизмов перемещения), кг, не более |
1500 |
|
Средняя наработка на отказ, ч, не менее |
10000 |
|
Температура эксплуатации, °С |
от + 15 до + 35 |
|
Относительная влажность воздуха (при температуре 35 °С), %, не более |
95 |
Знак утверждения типа
наносится на внутренней стенке шкафа стенда методом наклеивания или иным способом, обеспечивающим четкость на всё время службы стенда, а также на титульный лист
Руководства по эксплуатации типографским методом.
Комплектность
Таблица 4 - Комплектность средства измерений
|
Наименование и условное обозначение |
Обозначение |
Кол-во |
Примечание |
|
Робот-манипулятор |
- |
1 шт. |
Тип и модель определяется заказом |
|
Блок питания и управления Роботом-манипулятором |
- |
1 шт. |
Стандартный комплект |
|
Механизм вертикального перемещения (2-х стоечный электромеханический подъемник с блоком управления) |
- |
1 шт. |
Количество и тип определяется заказом |
|
Механизм горизонтального перемещения (линейный синхронный двигатель с блоком управления) |
- |
1 шт. |
Количество и тип определяется заказом |
|
Механизм вращения |
- |
1 шт. |
Количество и тип определяется заказом |
|
Электронный блок с каналами вихретокового, импедансного и ультразвукового неразрушающего контроля |
- |
1 шт. |
Количество и тип каналов определяется заказом |
|
Управляющий компьютер |
- |
1шт. |
Стандартный комплект |
|
Промышленный шкаф для размещения электронного оборудования стенда |
- |
1шт. |
Стандартный комплект |
|
Программно-управляемый схват смены инструмента |
- |
1 шт. |
Стандартный комплект |
|
Лазерный измеритель: Лазерный профилометр, Лазерный микрометр, Лазерный дальномер и типовые аналоги |
- |
1 компл. |
Количество и тип лазерных измерителей определяется заказом |
|
Видеокамера |
- |
1 компл. |
Количество и тип определяется заказом |
|
Измеритель твердости |
- |
1 компл. |
Количество и тип определяется заказом |
|
Вихретоковые преобразователи (параметрические, дифференциальные, единичные, матричные) |
- |
1 компл. |
Количество и тип определяется заказом |
|
Ультразвуковые преобразователи (одноэлементные, ЭМА, на фазированных решетках) |
- |
1 компл. |
Количество и тип определяется заказом |
|
Ударные преобразователи (единичные, матричные) |
- |
1 компл. |
Количество и тип определяется заказом |
|
Импедансные преобразователи (совмещенные, раздельно-совмещенные, матричные) |
- |
1 компл. |
Количество и тип определяется заказом |
|
Кабели соединительные |
- |
1 компл. |
Стандартный комплект |
|
Меры моделей дефектов типа: КС-1, RS-A-0,2-0,5-1, ОН-6, TS-2, |
- |
1 компл. |
Количество и тип определяется заказом |
|
Наименование и условное обозначение |
Обозначение |
Кол-во |
Примечание |
|
PS-3-4-5A и аналоги | |||
|
Настроечные образцы отраслевого и локального применения типа: СО-3Р, ОСО32 и аналоги |
- |
1компл. |
Количество и тип определяется заказом |
|
Кассета для преобразователей и образцов |
- |
1 шт. |
Количество и тип определяется заказом |
|
Упаковка |
- |
1 компл. |
Количество и тип определяется заказом |
|
Стенд лазерного сканирования и дефектоскопии «Робоскоп ВТМ-5000». Паспорт |
ВТМ 130 ПС |
1 экз. |
Стандартный комплект |
|
Стенд лазерного сканирования и дефектоскопии «Робоскоп ВТМ-5000». Руководство по эксплуатации |
ВТМ 130 РЭ |
1 экз. |
Стандартный комплект |
|
Стенд лазерного сканирования и дефектоскопии «Робоскоп ВТМ-5000». Методика поверки |
МП 039.Д4-17 с изменением № 1 |
1 экз. |
Стандартный комплект |
Сведения о методах измерений
приведены в разделе 5 «Порядок работы» Руководства по эксплуатации ВТМ 130 РЭ «Стенд лазерного сканирования и дефектоскопии «Робоскоп ВТМ-5000»».
Нормативные документы
ТУ 4276-001-83231613-16 Технические условия Стенды лазерного сканирования и дефектоскопии Робоскоп ВТМ-5000.
Другие Дефектоскопы