



Системы воздушного лазерного сканирования АГМ-А3


| Номер в ГРСИ РФ: | 95512-25 |
|---|---|
| Производитель / заявитель: | ООО "АГМ Системы", г.Краснодар |
Системы воздушного лазерного сканирования АГМ-А3 (далее - системы) предназначены для измерения приращения координат и определения трехмерных координат точек земной поверхности, инженерных объектов и сооружений с борта транспортных средств.
Информация по Госреестру
| Основные данные | |
|---|---|
| Номер по Госреестру | 95512-25 |
| Действует | по 21.05.2030 |
| Наименование | Системы воздушного лазерного сканирования |
| Модель | АГМ-А3 |
| Характер производства | Серийное |
| Идентификатор записи ФИФ ОЕИ | bcfad4a8-3aed-feb7-9615-af10b44ad129 |
Производитель / Заявитель
Общество с ограниченной ответственностью "АГМ Системы" (ООО "АГМ Системы"), г. Краснодар
Поверка
| Межповерочный интервал / Периодичность поверки |
1 год
|
| Зарегистрировано поверок | |
| Актуальность информации | 26.07.2026 |
Поверители
Скачать
|
95512-25: Описание типа
2025-95512-25.pdf
|
Скачать | 714.1 КБ | |
|
95512-25: Методика поверки
2025-mp95512-25.pdf
|
Скачать | 1.4 MБ |
Описание типа
Назначение
Системы воздушного лазерного сканирования АГМ-А3 (далее - системы) предназначены для измерения приращения координат и определения трехмерных координат точек земной поверхности, инженерных объектов и сооружений с борта транспортных средств.
Описание
Принцип действия систем основан на использовании вращающихся пар лазер/детектор, угол поворота которых измеряется кодовым датчиком (энкодером), установленным на оси вращения. При движении транспортного средства в трехмерном пространстве сканирующий пучок импульсного лазерного излучения направляется на объекты местности в плоскости, перпендикулярной оси вращения зеркала. Отраженные сигналы регистрируются приемником излучения и преобразуются в цифровую форму.
Система позиционирования состоит из ГНСС приёмника и инерциального блока, с помощью которых определяются пространственные координаты и ориентация систем.
Данные измерений всех компонентов систем синхронизируются по времени и записываются на внешний накопитель данных.
Определение взаимного положения антенны ГНСС приемника и инерциальной системы производится при изготовлении систем с использованием средств, не входящих в состав систем. Ориентация системы координат инерциальной системы относительно блока систем вычисляется при заводской калибровке инерциальной системы.
При постобработке по данным инерциальной навигационной системы вычисляется точная траектория движения систем в заданной системе координат (с учетом угловой ориентации в трехмерном пространстве), а по данным сканирующего блока строится цифровая трехмерная модель сканируемых объектов.
Конструктивно системы состоят из двух основных частей:
- сканирующего блока в моноблочном корпусе, изготовленного из металла и высокопрочного пластика, который в свою очередь включает в себя лазерный дальнометрический сканер, предназначенный для измерений дальности от центра сканирования до точки отражения лазерных лучей от объекта и систему инерциальной навигации, содержащую высокоточный ГНСС приемник и инерциальную систему, предназначенную для построения на основе результатов измерений цифровой трехмерной модели реальной поверхности сканируемых объектов;
- ГНСС антенны, изготовленной из металла и высокопрочного пластика, осуществляющей непрерывный прием и обработку сигналов со спутников космических навигационных систем.
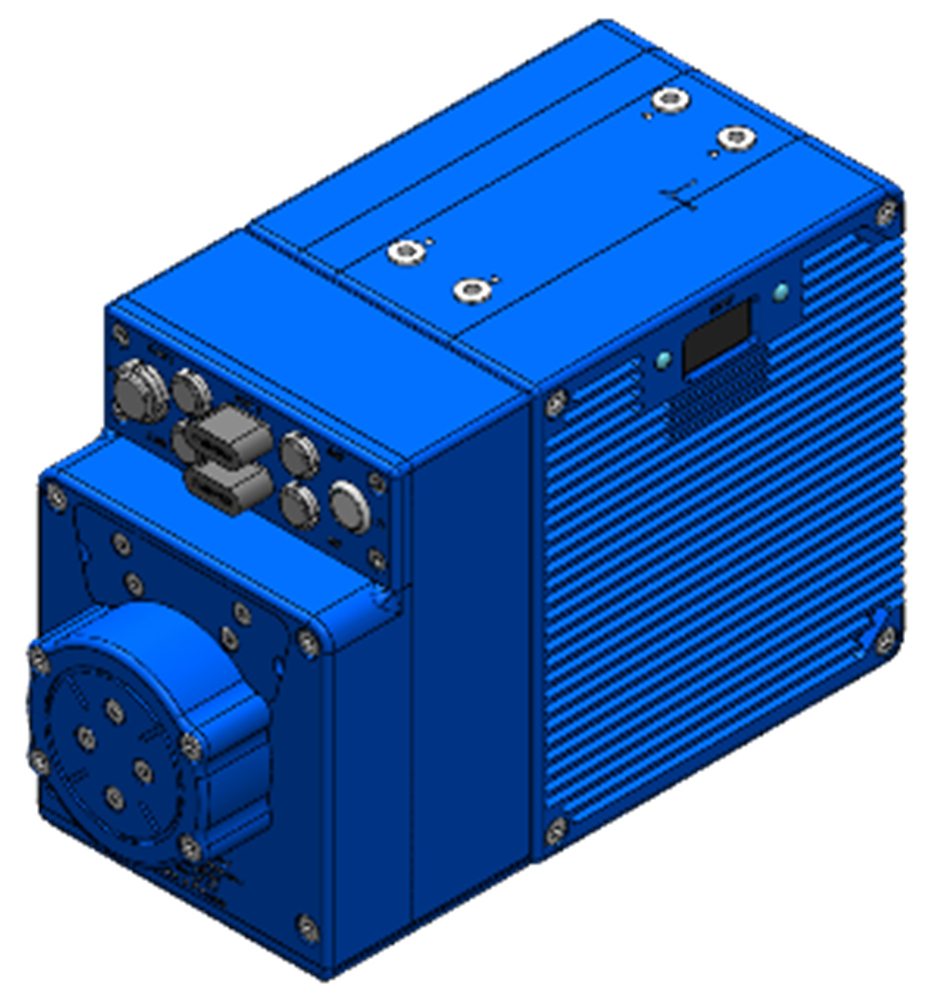
На передней панели сканирующего блока располагаются четыре монтажных отверстия.
На задней панели сканирующего блока расположены:
- разъем для подключения внешнего питания;
- 2 разъема для подключения внешней камеры;
- служебный разъем;
- функциональная кнопка для включения и выключения сканирующего блока;
- разъем для подключения внешней ГНСС антенны;
- 2 разъема для подключения внешнего накопителя данных;
- многофункциональный разъем.
На боковой панели расположены:
- информационный экран;
- 2 светодиода;
На верхней панели сканирующего блока располагаются четыре монтажных отверстия.
Системы не имеют специальной пломбировки; все винты, обеспечивающие доступ к компонентам, которые могут повлиять на изменение характеристик системы, заливаются специальным лаком.
Нанесение знака поверки на средство измерений не предусмотрено.
Заводской номер систем размещается на корпусе сканирующего блока в числовом формате в виде гравировки.
Общий вид сканирующего блока и ГНСС антенны приведен на рисунке 1. Общий вид сканирующего блока с указанием места нанесения знака утверждения типа и места размещения заводского номера приведен на рисунке 2.
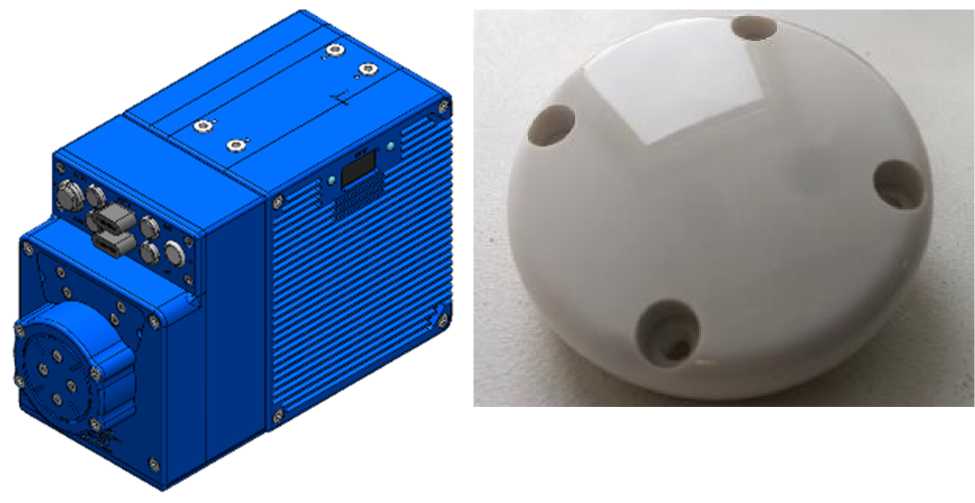
Сканирующий блок
АГМ-А3 ГНСС-антенна
Рисунок 1 - Общий вид сканирующего блока и ГНСС антенны
Место нанесения знака
утверждения типа
Место размещения заводского номера

Рисунок 2 - Место размещения заводского номера
Программное обеспечение
В системах используется встроенное программное обеспечение (далее - ПО) MsX-control_fw, отвечающее за работу системы, а также AGM ScanWorks, использующееся для вывода точек лазерного отражения в системе координат WGS (UTM), ПО AGM PosWorks Web используется для расчета траектории в режиме постобработки по данным системы инерциальной навигации, базовых станций. Средства для программирования или изменения метрологически значимых функций отсутствуют.
Уровень защиты ПО «низкий» в соответствии с Р 50.2.077-2014.
Таблица 1 - Идентификационные данные ПО
|
Идентификационные данные (признаки) |
Значение | ||
|
Идентификационное наименование ПО |
MsX-control_fw |
AGM ScanWorks |
AGM PosWorks Web |
|
Номер версии (идентификационный номер) ПО |
2.0 и выше |
5.0 и выше |
0.4.18 и выше |
Технические характеристики
Таблица 2 - Метрологические характеристики
|
Наименование характеристики |
Значение характеристики |
|
Диапазон сканирования, м |
от 5 до 1640 |
|
Доверительные границы абсолютной погрешности определения координат точек земной поверхности в заданной системе координат (при доверительной вероятности 0,67) 1), мм в плане по высоте |
±(25+0,3А0’4Ъ)2) ±(25+0,340-4Ъ)2) |
|
Примечание: 1) Системы обеспечивают заявленную точность определения координат точек земной поверхности в заданной системе координат (прямоугольной системе координат) при отражательной способности поверхности объекта сканирования более 80%, скоростях транспортного средства до 120 км/ч и использовании в качестве базовой станции ГНСС-приемника с границами допускаемой абсолютной погрешности измерений приращений координат (при доверительной вероятности 0,95) в режиме кинематика ±2^(6+0,540’6<D) мм, где D - длина линии, вычисленная по измеренным приращениям координат в мм. Заданная система координат задается относительно точки установки базовой станции. Заявленные точностные характеристики достигаются при одновременном приеме сигналов ГНСС ГЛОНАСС и GPS встроенной НАП из системы воздушного лазерного сканирования и базовой станции. 2) Где L - расстояние до точки сканирования, мм. | |
Таблица 3 - Технические характеристики
|
Наименование характеристики |
Значение характеристики |
|
Угловое поле сканирования в горизонтальной плоскости, градус 1) |
от 0 до 60 |
|
Напряжение питания постоянного тока, В внешний источник питания |
от 11,2 до 12,7 |
|
Диапазон рабочих температур, °С |
от -10 до +60 |
|
Габаритные размеры, мм, не более сканирующий блок длина |
217 |
|
ширина |
98 |
|
высота |
138 |
|
ГНСС антенна диаметр |
90 |
|
высота |
23 |
|
Масса, кг, не более сканирующий блок |
2,9 |
|
ГНСС антенна |
0,19 |
|
1) Градус - единица измерений плоского угла. |
Знак утверждения типа
наносится на боковую панель сканирующего блока в виде наклейки и на титульный лист руководства по эксплуатации в виде наклейки или типографским способом.
Комплектность
Таблица 4 - Комплектность систем
|
Наименование |
Обозначение |
Количество |
|
1 Системы воздушного лазерного сканирования: |
АГМ-А3 |
1 комплект |
|
1.1 Сканирующий блок |
1 шт. | |
|
1.2 ГНСС антенна |
1 шт. | |
|
1.3 Внешняя батарея |
1 шт. | |
|
1.4 Зарядное устройство |
1 шт. | |
|
1.5 Кабель питания |
1 шт. | |
|
1.6 ГНСС кабель |
1 шт. | |
|
1.7 USB-накопитель |
1 шт. | |
|
2 Программное обеспечение (USB-накопитель) |
AGM ScanWorks |
1 шт. |
|
3 Программное обеспечение (онлайн доступ) |
AGM PosWorks Web |
1 шт. |
|
4 Системы воздушного лазерного сканирования АГМ-А3. Руководство по эксплуатации (USB-накопитель) |
- |
1 экз. |
|
5 Системы воздушного лазерного сканирования АГМ-А3. Паспорт |
- |
1 экз. |
Сведения о методах измерений
приведены в главе 2 «Работа с Системой» документа «Системы воздушного лазерного сканирования АГМ-А3. Руководство по эксплуатации».
Нормативные документы
Приказ Росстандарта от 7 июня 2024 г. № 1374 «Об утверждении Государственной поверочной схемы для координатно-временных средств измерений»;
Системы воздушного лазерного сканирования АГМ-А3. Технические условия.
ТУ 265112-010-29612876-23.